Hi Team,
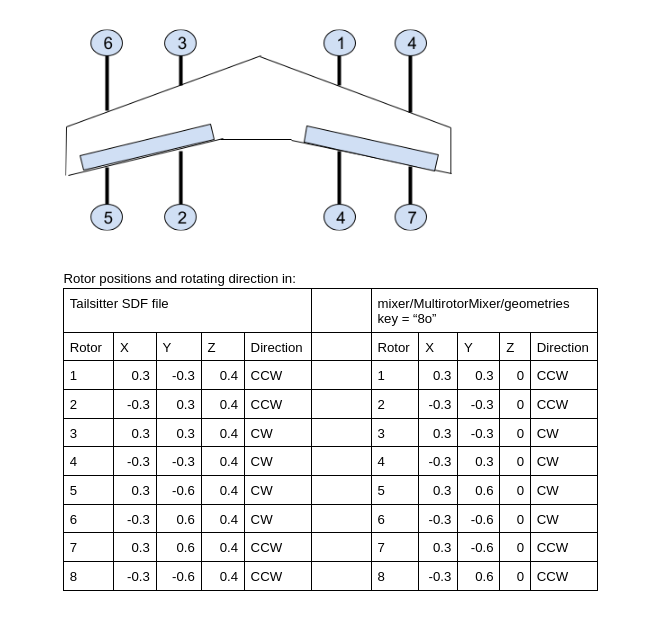
I am trying to simulate the 8 rotors tailsitter similar to 4 rotors tailsitter made available in Gazebo Simulation. I edited the tailsitter files with respect to link and executed build command —> make px4_sitl gazebo_tailsitter, No errors reported in the terminal window. The Gazebo window launced the tailsitter with 8 rotors. But, when I armed it, it is not flying as excepted. when I increased throttle upto 100 %, Only 4 (1,2,3,4) rotors rotate as excepted, 5&8 th rotors rotate slowly and 6&7 th rotors are not rotating. The flight log has a evidence of pwm signals generated for 8 motors/rotors and 2 control surfaces.
I didn’t modify the mass, inertia, motor constants, liftdrag plugins values etc., in the tailsitter.sdf files. Just reduced the input _scaling to 700 from 1200.
I modified the following files to configure for 8 rotors.
- PX4-Autopilot/Tools/sitl_gazebo/models/tailsitter.sdf
- PX4-Autopilot/ROMFS/px4fmu_common/mixers-sitl/quad_x_vtol.main.mix
- PX4-Autopilot/ROMFS/px4fmu_common/init.d-posix/airframes/1041_tailsitter
- PX4-Autopilot/ROMFS/px4fmu_common/mixers/quad_x_vtol.main.mix
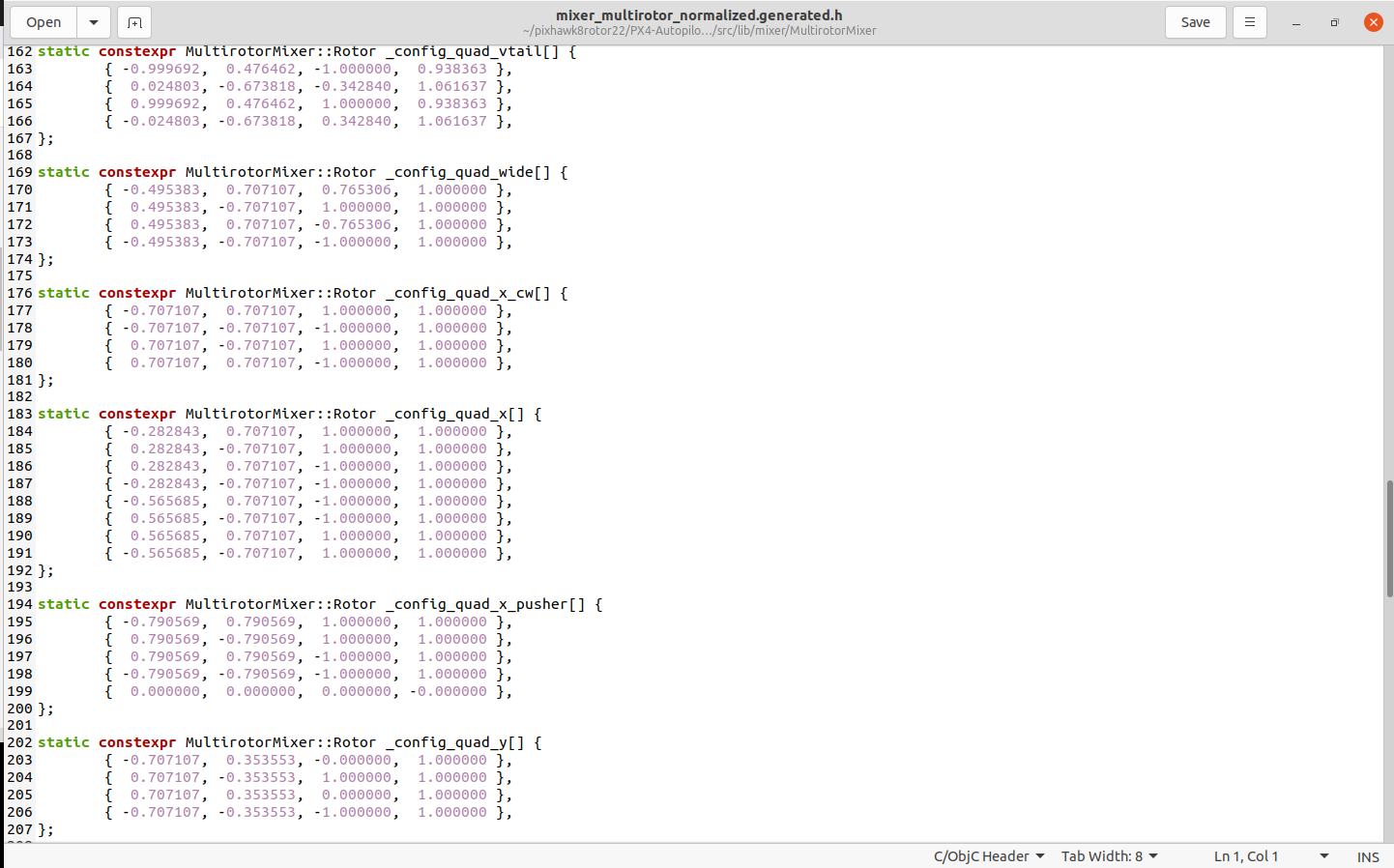
- PX4-Autopilot/src/lib/mixer/MultirotorMixer/geometries/quad_x.toml
Did I missed any files/parameters to modify/edit in simulating 8 rotors tailsitter?

Thank you.