Hello everyone,
I want to test a Tiltrotor Vtol drone in gazebo,
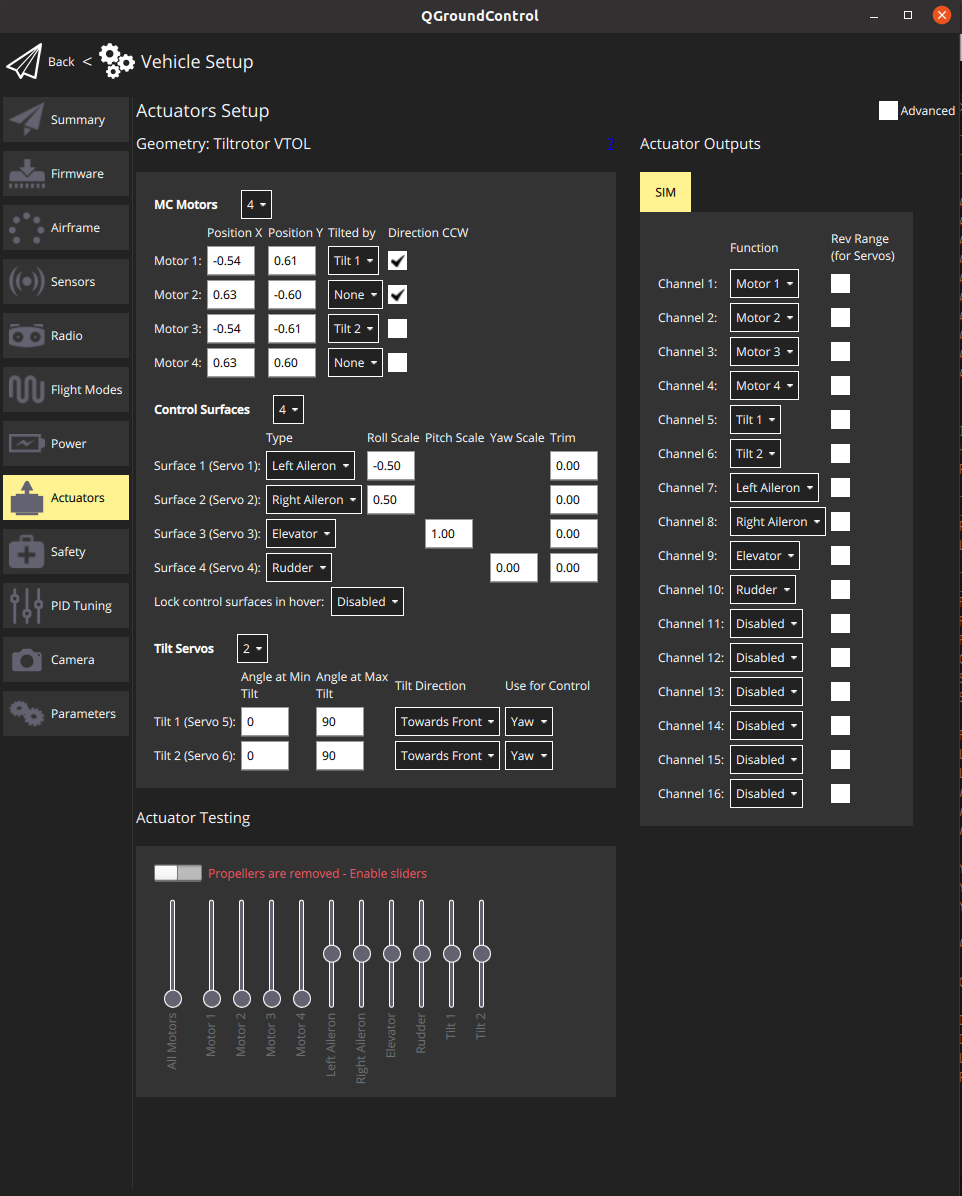
I can take off but can’t move the drone
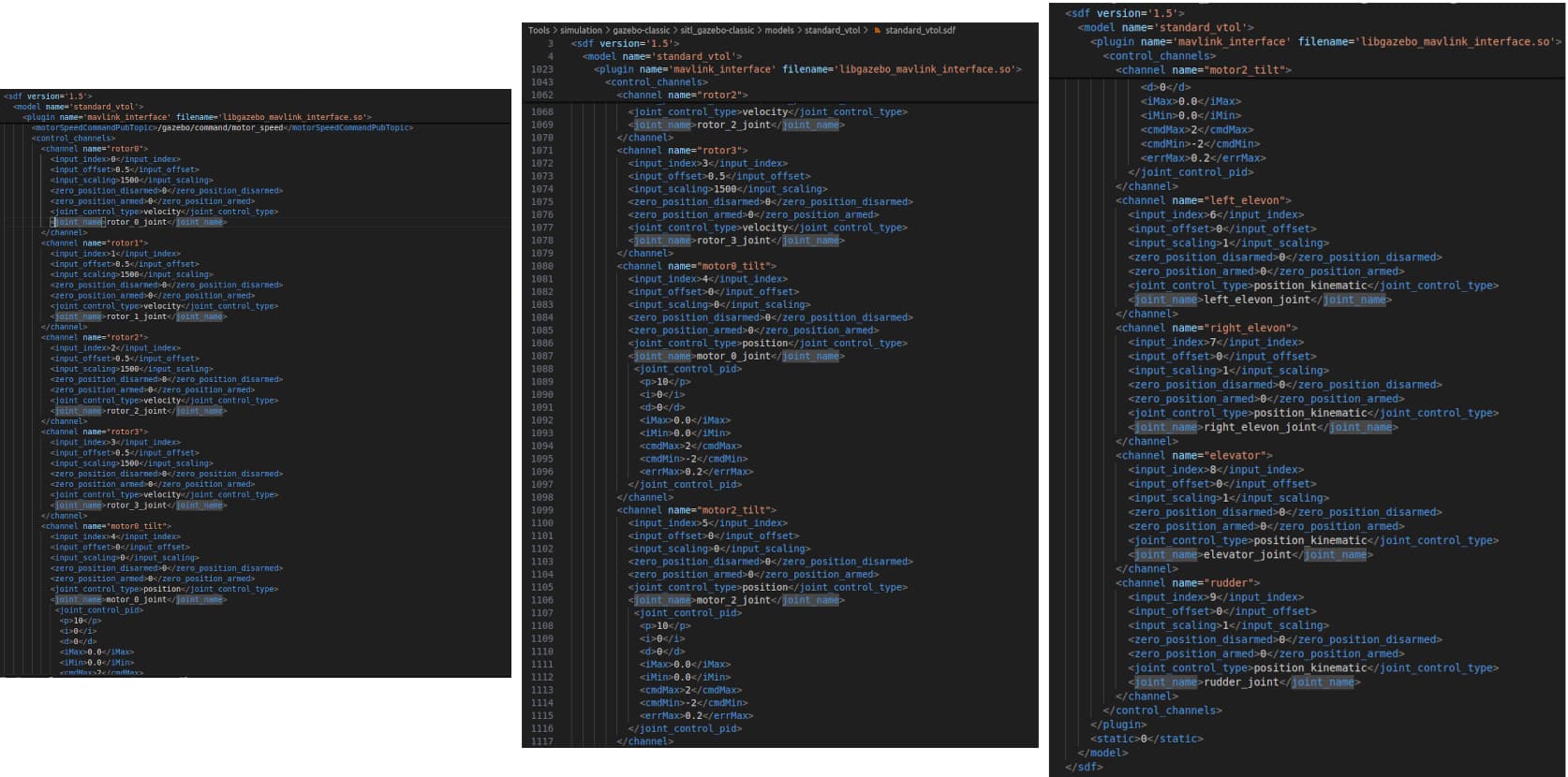
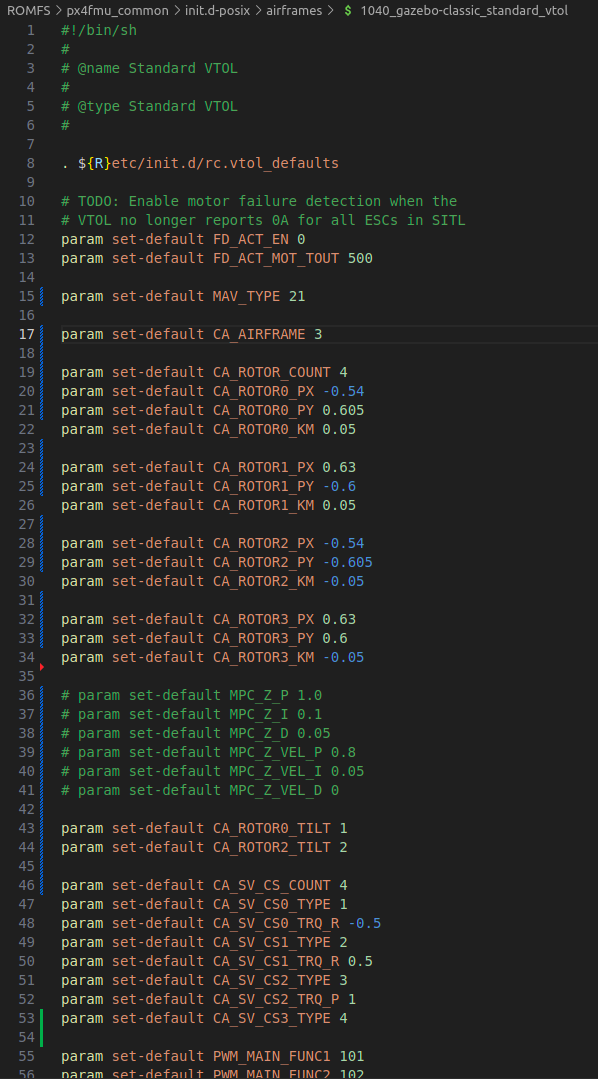
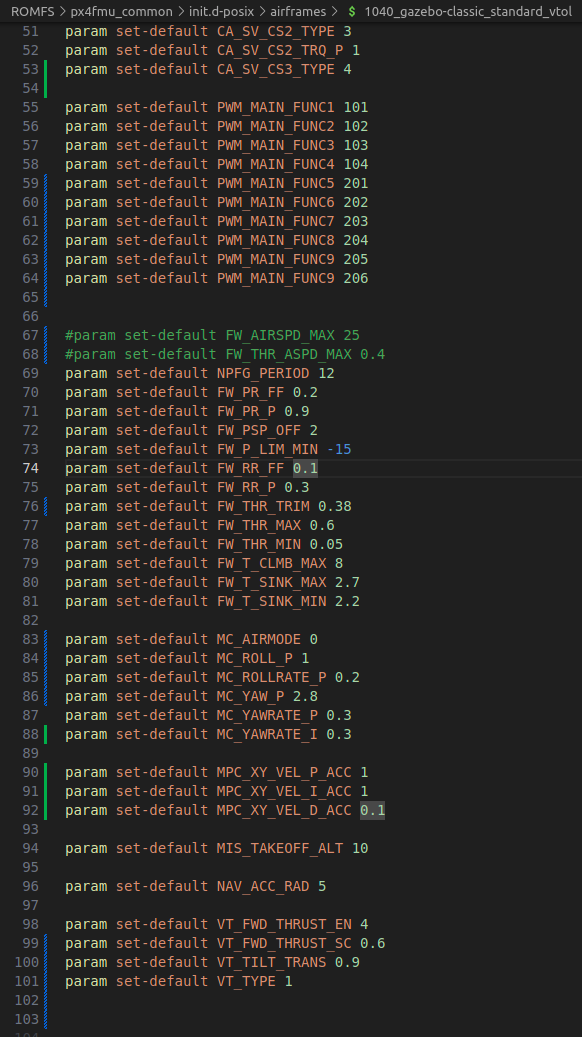
so I edited the standard_vtol.sdf file to add my own stl files and i reuse the channels configurations of the tiltrotor.sdf file. I’ve also configure the 1040_gazebo-classic_standard_vtol file located in ROMFS->px4fmu_common->init.d-posix->airframes with the new PWM_MAIN_FUNCTION for the tiltrotors, elevator and rudder. However I only can taking off.
Could this be due to the inertia parameters of my files ?
Is there a way to ignore them in a first time ?
Did I forget to modify a file?
Is the 1040_gazebo-classic_standard_vtol file is the mixer ? I’m not sure I understood the mixer.
Thank you,
Ubuntu 20.04
PX4 version 1.15.0 80
Gazebo 11.14
Nathan