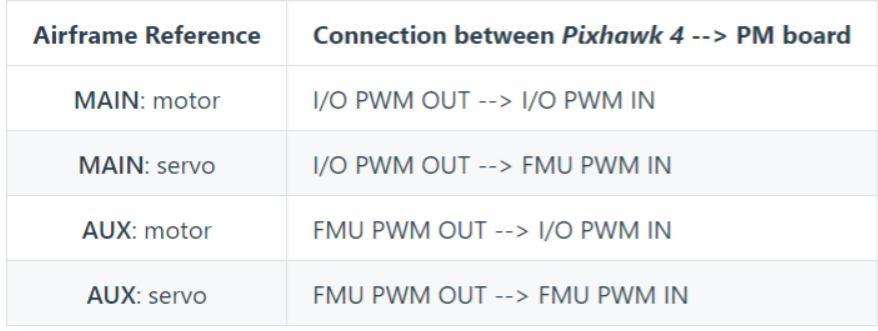
Hello everybody. I am new to Pixhawk 4 and PX4 and I have a question about the (generic) rover reference. The documentation says that MAIN 2 output is for steering and MAIN 4 is for the throttle. But in the Wiring Documentation is says that servos should be connected to the FMU PWM-OUT (so AUX, not MAIN) rail of the Power Management Board. So, I cant really understand where to connect my servo. Should I connect it to B+,GND and M2 of the PM Board or should I connect it to the FMU-PWM OUT which is the servo rail? And if the second, how it will be compatible with the rover reference that says steering is in MAIN2? Also, I can’t undestand the picture attached from the documentation. If I have a MAIN motor and a MAIN servo how I am supposed to connect I/O PWM OUT of Pixhawk 4 to both I/O PWM IN and FMU PWM-IN of the PM Board?