I built a small airplane and I need to control it with a Pixhawk 4.Can someone point me in the right direction on how to use servo motors with the Pixhawk 4 and QGroundControl. I’ve been trying to figure this out for a couple weeks but I don’t know where to start. I need the Pixhawk to control 3 servos and a motor to help the airplane move in the air.
One thing I have tried already is to use the pwm pins on the pixhawk but I don’t know how to use QGoundControl to tell the Pixhawk to use the servos.
Hello @Gabe_Skidmore ,
You will find everything you need for your initial setup here: https://docs.px4.io/en/config/
Good luck!
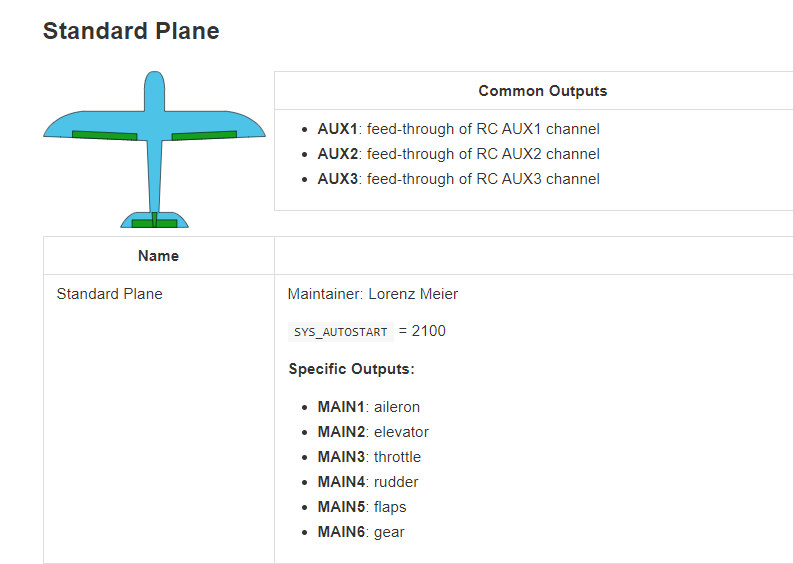
Sorry if my questions sound basic but I’m a newbie at this. I want to be able to have autopilot for a standard plane and I have been trying to set up the servos with no<luck. The documentation says to use main 1 through main 6 for the servo motors and the thruster motor but I am confused on how to set that up. Here is a picture of the configuration. Also, are you able to tell me what SYS_AUTOSTART means.
I looked at the documentation on how to connect the wires from the Pixhawk 4 to the power management board but the configuration seems weird because it says to have the I/O PWM OUT go to both the I/O PWM IN and the FMU PWM IN. Since the plane has a main motor and main servos, am I supposed to get a splitter that will take the I/O PWM OUT to both the I/O PWM IN and the FMU PWM IN?
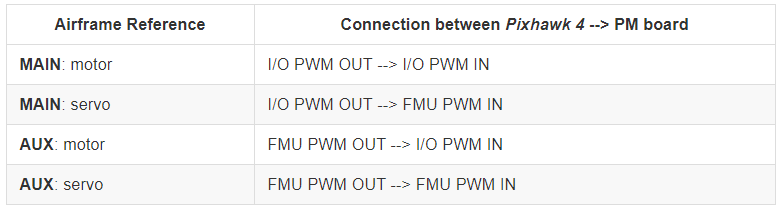
Since everything on that configuration goes to the MAIN outputs (IO out) and that you want to connect the servos and the motor to the servo headers of the distribution board (FMU in), you just need to connect one cable from I/O PWM OUT (Pixhawk side) to FMU PWM IN (distribution board side).
Note that you have to power the servos with an external BEC (or with the build-in BEC of your ESC, if there is one and that it can provide enough current).
Hope it helped!
Thank you, I did’t realize the I/O PWM Out cable had to be plugged into the FMU PWM port on the power management board.