I’m trying to build a quadcopter that I will use autonomously. With the servo, I will release my load when it reaches a certain distance. However, I did not know where to connect the servo on the power management board. As I understand it, I need to connect it to PWM-OUT in the FMU part. It has 1 to 8 aux outputs. Which of these outputs should I plug in?How will the pin I use here be named in the misson planner?
I would be glad if you help.
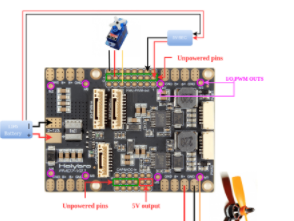
Can you explain what you mean in this picture?
If I can understand what you are saying? the 1-8 are ESC pads. the servo is connector. the servo should show up on the planner as a aux. But double ck this
Hi
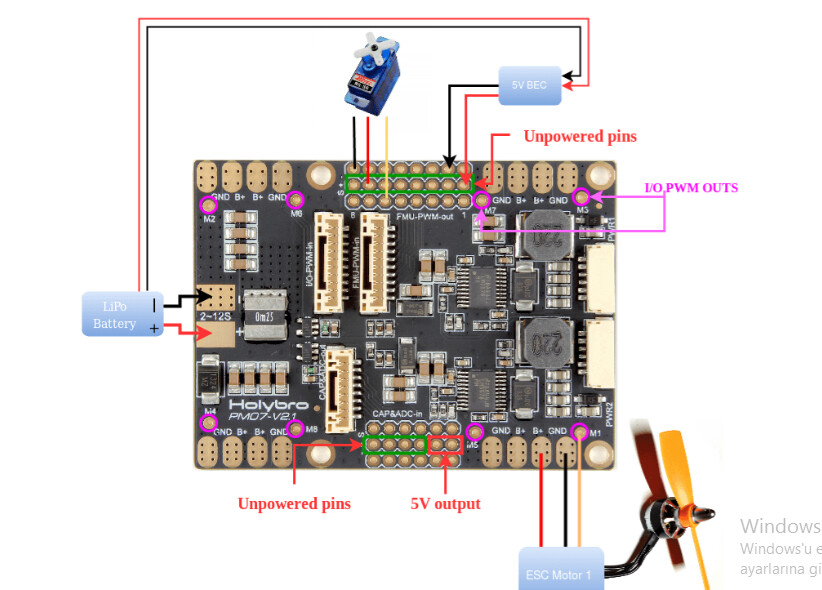
M1 to M8 means main 1 to main 8 ports(I/O PWM) in QGC
FMU PWM means aux 1 to aux 8 ports (FMU PWM)
good luck 
Hello
Thanks Roomez! I connected a servo to aux 1 and ran it through the misson planner from the servo test tab. So, can I run this servo from the remote at the same time, connected to Aux 1? Thanks in advance!
YES! if you mean remote is radio control. yes you can control servo to Aux1 with radio control.
Thanks @roomez
Yes, I tried to say radio control. But how should I do it? I would really apreciate if you help.
Thanks in advance
You should read these pages:
https://docs.px4.io/master/en/concept/mixing.html
https://docs.px4.io/master/en/config/radio.html
Thank you so much! I will read these.