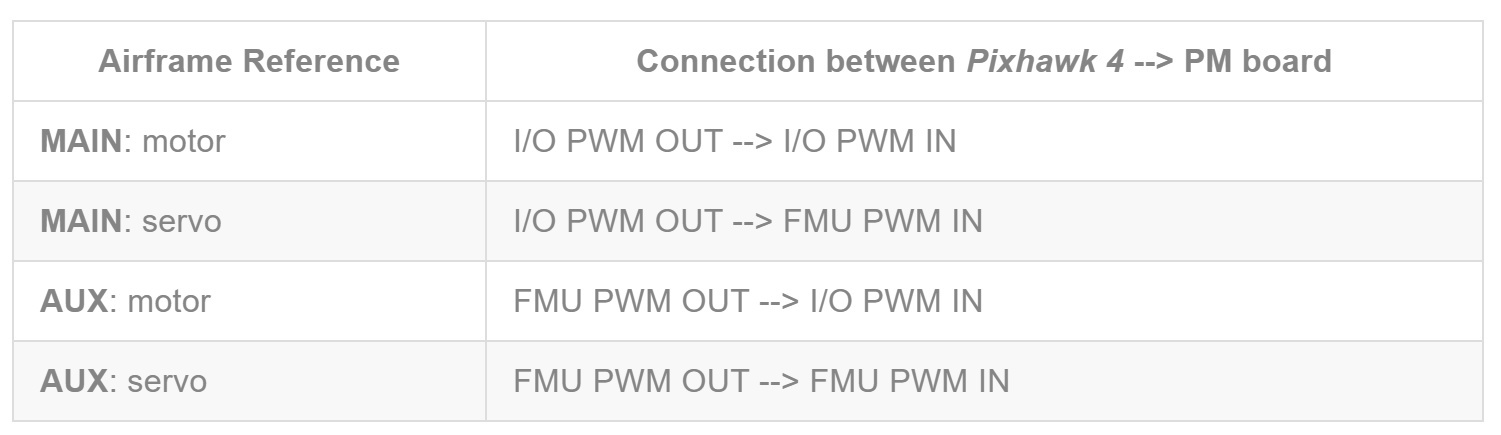
Suppose I have Main 1-4 Mapped to servos, Main 5, 6 mapped to motors in PX4. According to the table above, I need:
I/O PWM Out -->I/O PWM IN to enable the motors
I/O PWM Out -->FMU PWM IN to enable the servos
then
Do I need a Y wire to connect pixhawk4’s I/O PWM Out to both PMB’s I/O PWM In and FMU-PWM-In?
And use PMB’s FMU-PWM-out 1-4 for servo, and PMB’s M5 and M6 for motor?
Or Else?
If I misunderstand the table, please state out too.
If you don’t know what I am talking about, you may just simply show me how you connect the Pixhawk and PMB for an standard plane like aircraft which has both motors and servos in MAIN channels. That would help me.
PixLark,
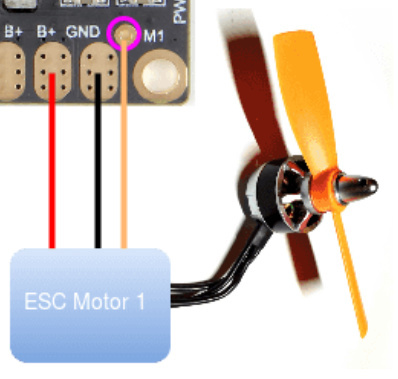
Great Question. I do not have an answer for you but have you tried soldering any ESCs with motors to the PMB’s M(1-8) = signal, GND = ground, B+ = power?
I interpreted it that you do not need Y-Wire from FMU-PWM-out to these areas because there is a circular signal port M(1-8) on the PM Board. (SOMEONE PLEASE CORRECT ME IF I AM WRONG)
PixLark,
I did not figure out how to remap on PX4. However, I started using ardupilot instead and I had more success at getting all 8 FMU_PWM_OUT channels working.
@j_andia @PixLark
Hi j_andia and PixLark
I’ve been having the same problem mapping the I/O and FMU PWM outputs… I’ve been looking at Ardupilot and it seem more intuitive. QUESTION: Is there only 8 outputs on the board total or 16 (8 motors and 8 servos)? Are the motors M1-M8 identified as Main and FMU as AUX?
Thanks
Tim