Greetings everyone!
I have a problem/ question regarding the S-BUS OUT port on the Pixhawk 4.
My setup is as it follows:
transmitter: Radiomaster TX16S with RFD TX-MOD v.2
receiver: RFD 900ux 2.0
a rover with 2 stepper motors
Mission Planner for mission command.
The rover I have can only accept 2 protocols: IBUS and SBUS.
I connected the receiver to Pixhawk 4 in the TELEM1 and DSM/ SBUS RC ports. On Radiomaster I selected the External RF as S-BUS. The binding is made and in Mission Planner I can see the inputs in Radio Calibration.
The problem is as it follows:
To send the signal from the autopilot to the CPU of the rover, I use the SBUS OUT port of the Pixhawk 4. The problem is that the CPU doesn’t receive the signal and the rover doesn’t move.
I also want to mention that if I connect the rover directly to the receiver, it register the signal and the rover move as intended.
How can I make the rover move using the SBUS OUT port?
If anyone else has to deal with this problem, I’ll leave a little guide on how I managed to solve the problem:
First, on the External RF module, the PPM mode must be set, not S-BUS. Then depending on what program you use(QGroundControl/ MissionPlanner), for the output port you must enable S-BUS out (in QGC, is the parameter “ENABLE_S-BUS_out”).
I’m trying to do something similar to you. So I just wanted to confirm that you are using the 3-pin SBUS OUT port on the px4? Unfortunately, I’m not getting any output on pin2 of that connector but I’m gonna scope it out tomorrow.
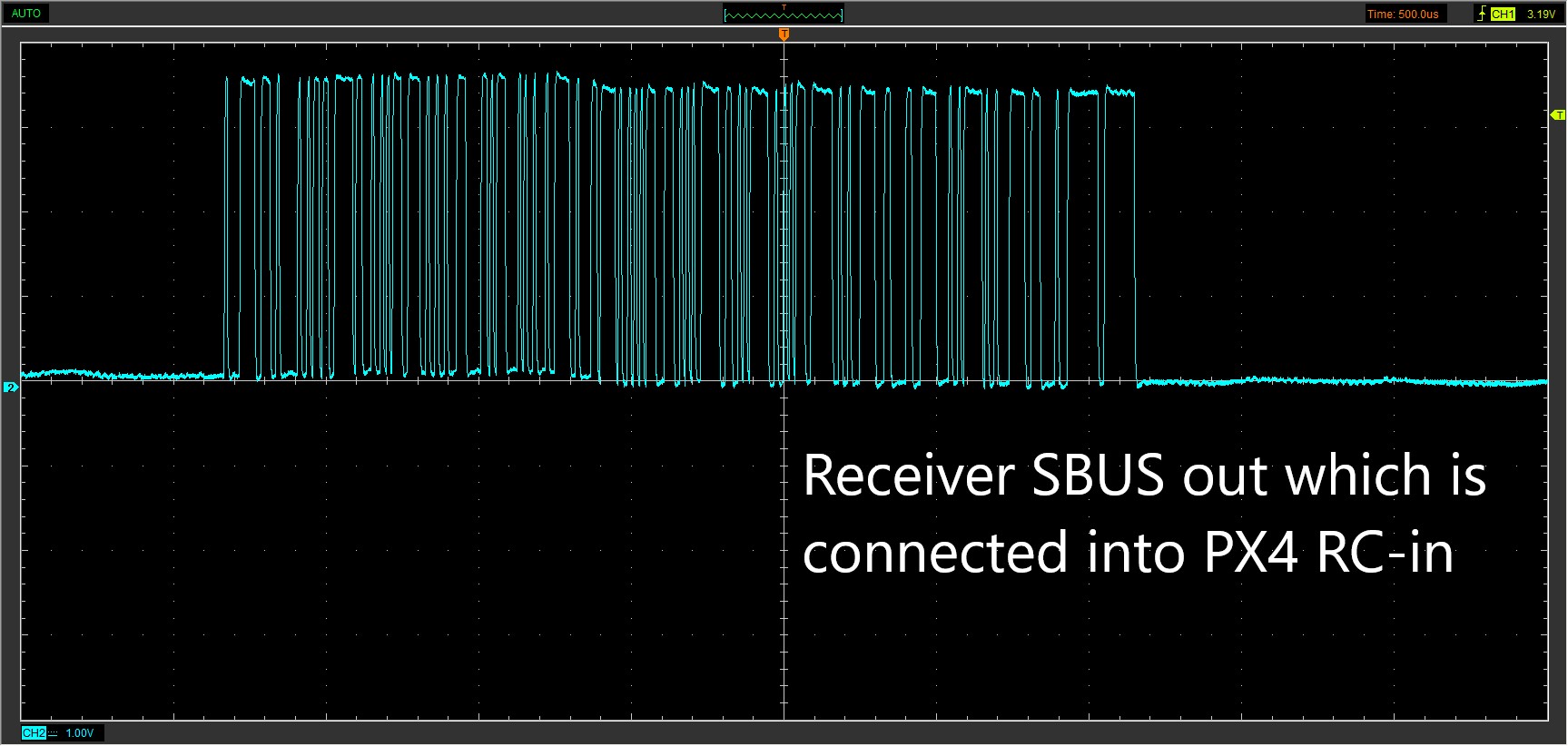
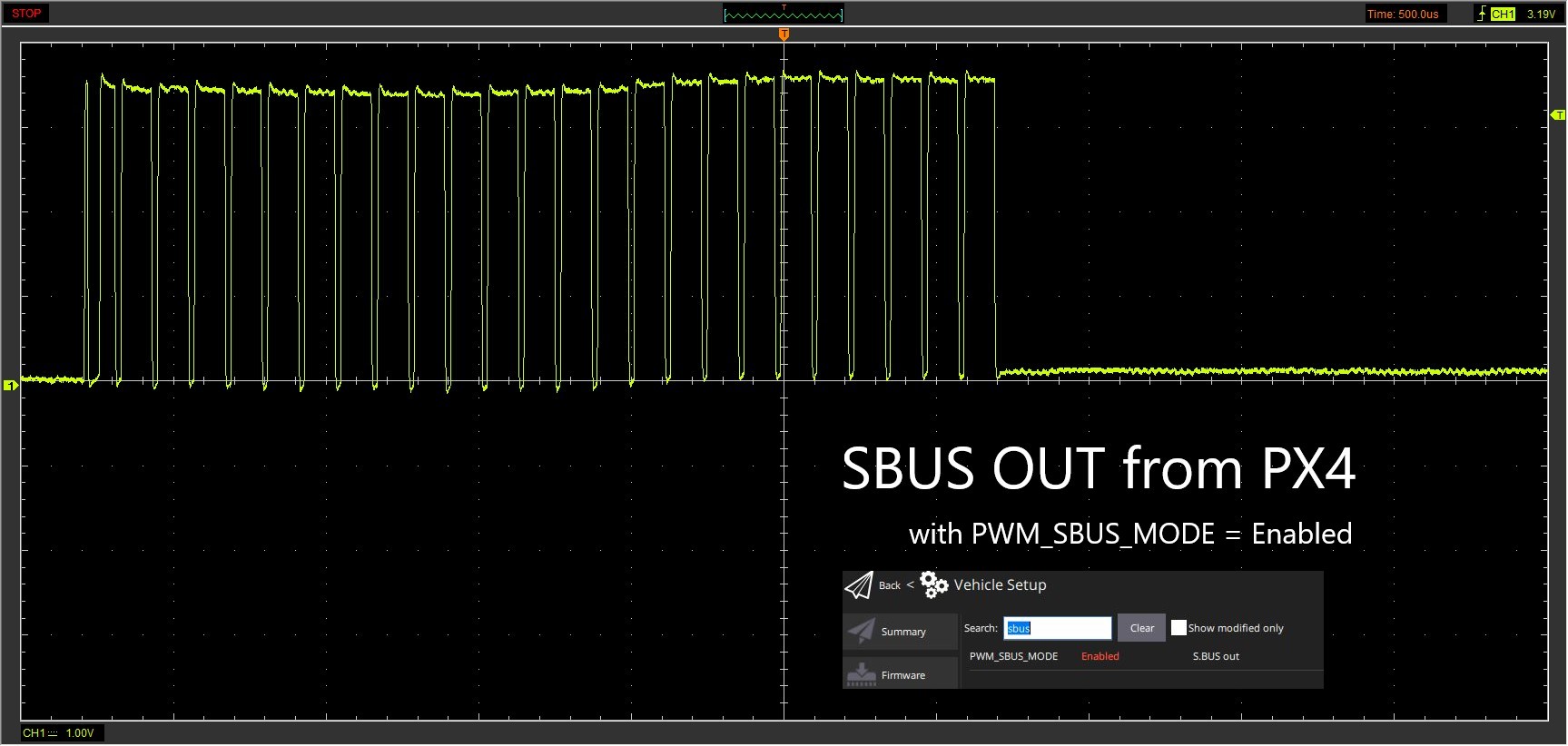
Hi Alex, so I need some kind of SBUS passthrough to control a gimbal and I thought that the “SBUS out” - 3 pin connector on the px4 would do it but I only seem to get the following waveform out of it (I assume is PWM) which does not resemble the RC-in waveform. The SBUS out waveform never changes, even with RC inputs and the PX4 in armed status. There must be some kind of trick to getting this to work but I’m not finding it.
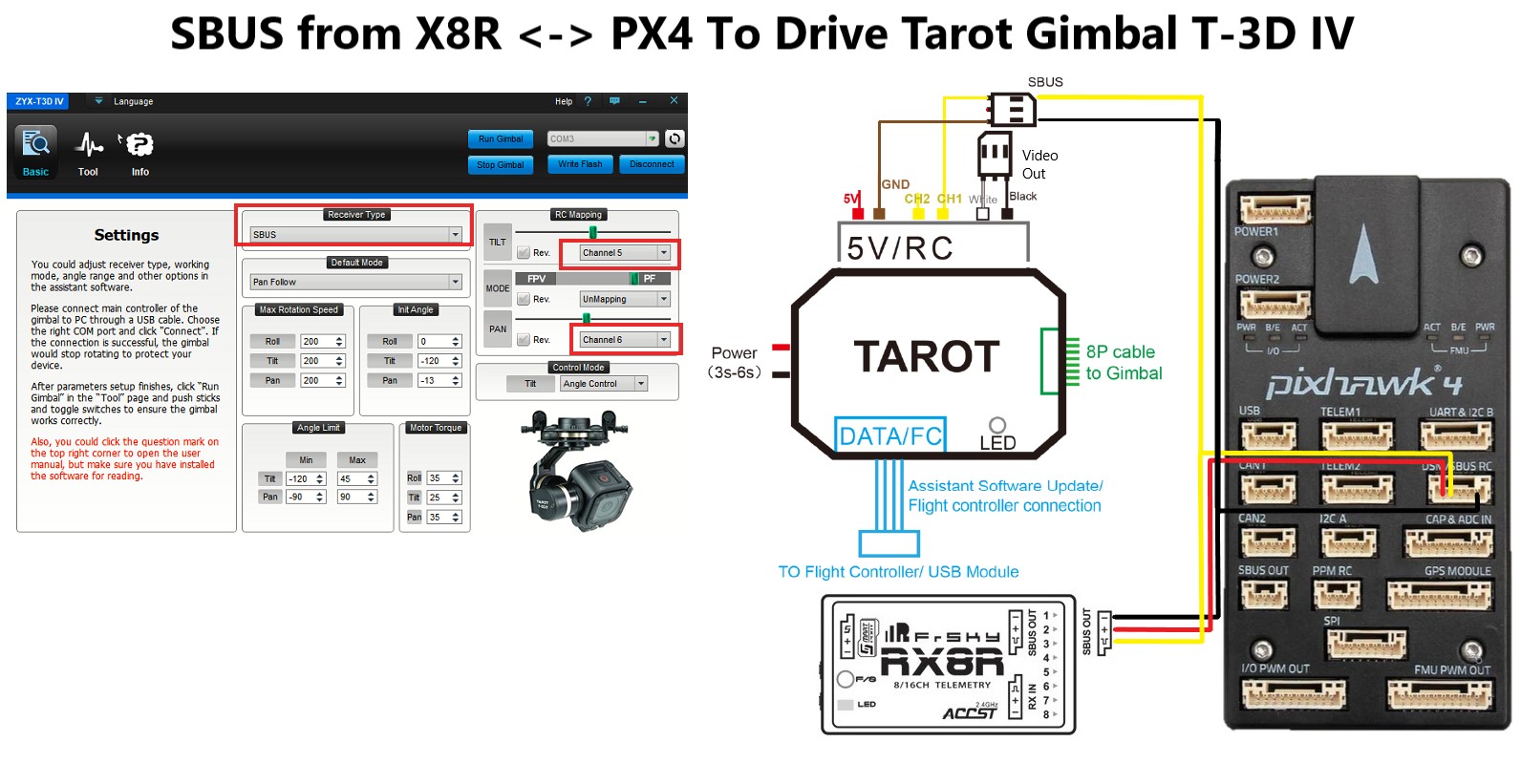
Ok, so apparently this info is not available anywhere. I always assumed that the SBUS was point to point. Apparently you can put other devices on the same bus so that’s what I’ve done to drive the SBUS gimbal from the RC and effectively bypassing the PX4 as I could never get the SBUS out from the PX4 to properly pass-through.