When switching from Offboard mode to AUTO.LAND via /mavros/set_mode service, the drone will yaw to a value that doesn’t immediately make sense to me. Does someone know why this yaw setpoint is changing and how to prevent it from happening?
Thanks!
Hi,
Are you on PX4 v1.14.-rc1 . Kindly share your log file
Hi, thanks for your response.
Here is my log:
https://review.px4.io/plot_app?log=844410b4-3183-4477-9372-5c61c1bac109
Hi,
You have a v. good battery chemistry. What is the battery capacity and prop size
Thanks! It’s a 6S LiPo, 10in props
I see that during landing the drone shifts to position mode and then to land mode again. Do you get GPS from ground position or can you take off the drone using position mode becos for position mode to be active you require GPS .
Edit-1 Also please check this post …may be related …
Are you referring to timestamp 0:53.5? If so that occurs after the yaw movement I’m interested in.
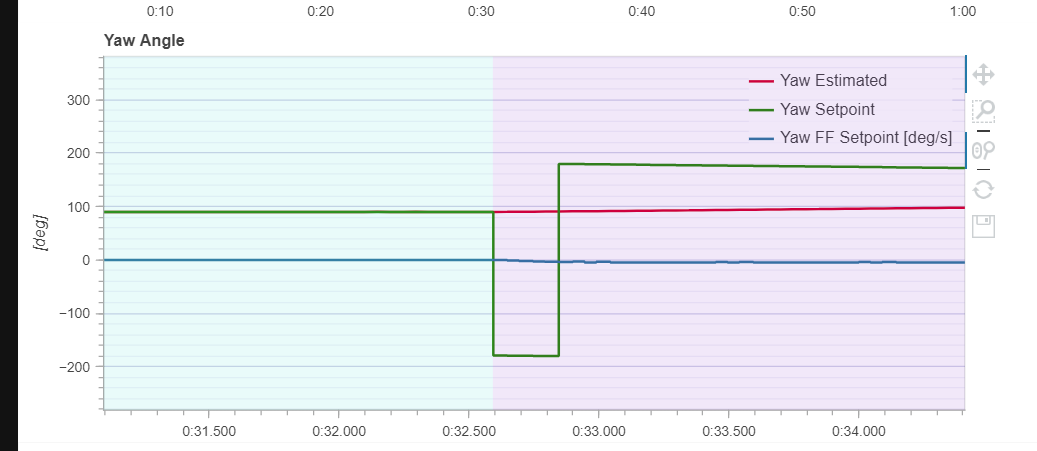
The yaw movement occurs at timestamp 0:32.6, at the switch from OFFBOARD to LAND
I had the same issue. Every time when the drone switches from offboard mode to auto.land mode, the yaw setpoint is set to the east immediately, and that causes the drone to yaw. Don’t know how to resolve that yet, have you figured out how to resolve that?
Haven’t figured it out yet… had to look into some other stuff. Will circle back when I get to it ![]()
Increase yaw slew limit setting will relieve the problem a bit
I’ve been facing the same issue with indoor flight. Haven’t you found a solution yet? droneGuy, could you please tell me the specific parameter name for the “yaw slew limit”?
Haven’t you found a solution yet?we also met this problem but didn’t figure it out ![]()