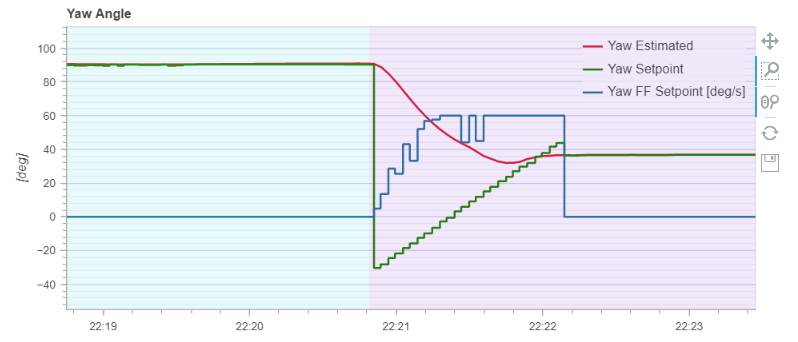
My program triggers auto.land in offboard mode. The drone is able to descend nicely until when it is very close to the ground, it yaws in a sudden. By looking at the log, I found that at the moment when the drone switching from offboard mode to land mode, the yaw setpoint changes immediately; and I also found that the yaw setpoint is been set to the east. Does anybody knows why the yaw setpoint changes when switching to land mode?
The log is here: https://review.px4.io/plot_app?log=9e75b2cb-e918-4565-9068-c6bca37e84e9