I have Pixhawk 4 mini and I would like to connect it to a raspberry pi or Jetson, but i read that the connection is usually done via TELEM2 port, which the Pixhawk mini doesnt have, can it still be done via other connections?
It can be done via Telem1 port but then you can’t use Telem1 for whatever radio you would be using to the ground station and need to somehow connect that to the RPi. On there you can use e.g. mavlink-router to split up the mavlink connection into one part going to your program and the telemetry/serial/IP link.
When i configure MAV_1/2_CONFIG to UART6 it doesn’t let me change MAV_1/2_FORWARD/MODE/RATE params, which are required to be changed in order to connect to onboard computer. what can I do? Is this even possible?
Is there any additional information available? Even following the steps laid out above I am unable to get data from the pixhawk mini 4 on the connected raspberry pi 4 (running Ubuntu 21)? I try starting mavsdk_server to configure with
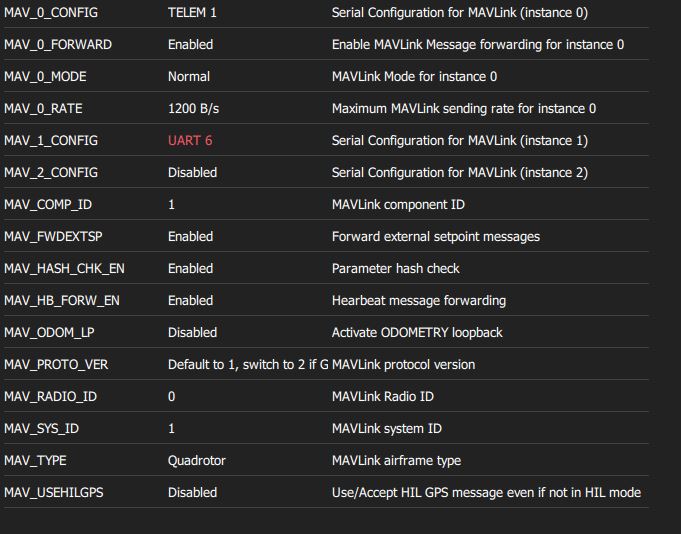
 and if I configure MAV_1/2_CONFIG to be telem1 it shows me forward/ rate/ mode options
and if I configure MAV_1/2_CONFIG to be telem1 it shows me forward/ rate/ mode options