Hi all,
I am new to PX4. I have a PixHawk 4 Mini hooked to an Odroid XU4 as a companion computer.
I am trying to set up a MAVLink connection between my computer and the companion computer (in order to later use the drone in OFFBOARD mode)
When running the MAVROS node on the Odroid, I get this:
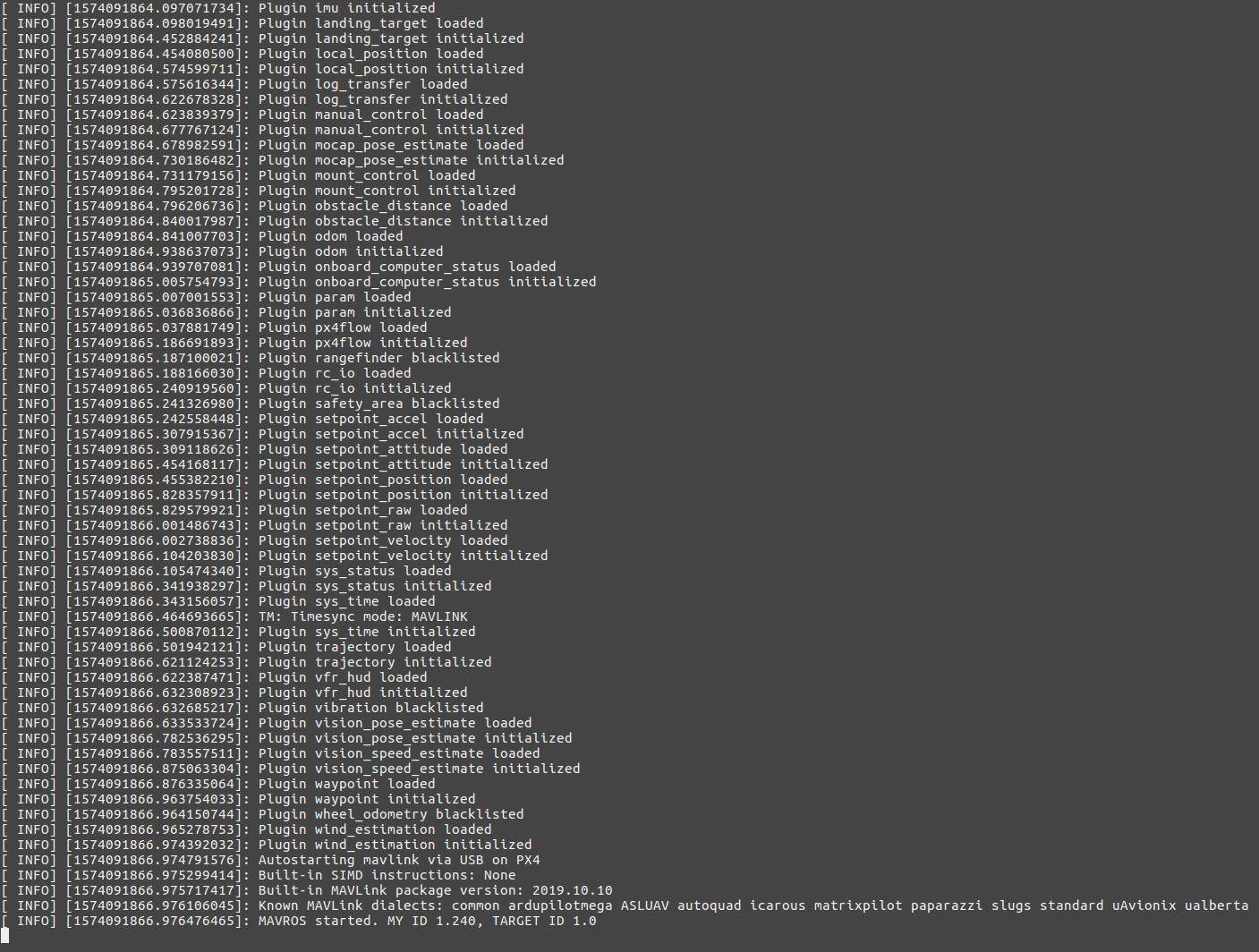
From experience, I expect to see
[ INFO] [...]: IMU: High resolution IMU detected!
but it never comes.
I followed the guide to set up a companion computer here, and set the PX4 parameters as specified, i.e.:
-
MAV_1_CONFIG=TELEM 2 -
MAV_1_MODE=Onboard -
SER_TEL2_BAUD=921600
The Odroid is connected to the PixHawk through a FTDI on the UART&I2C B port.
My suspicion is that since PixHawk 4 Mini does not have a TELEM 2 port, I should set MAV_1_CONFIG to something else, but I cannot figure out what.
Is this an issue anyone has run into ?
Many thanks and a great week to all!