I’ve built X500 v2 with Pixhawk 6c and tried to connect PX4 autopilot with raspberry pi.
MAV_1_CONFIG: TELEM 2
MAV_1_FORWARD: Enabled
MAV_1_MODE: Normal
MAV_1_RADIO_CTL: Disabled
MAV_1_RATE: 1200 B/s
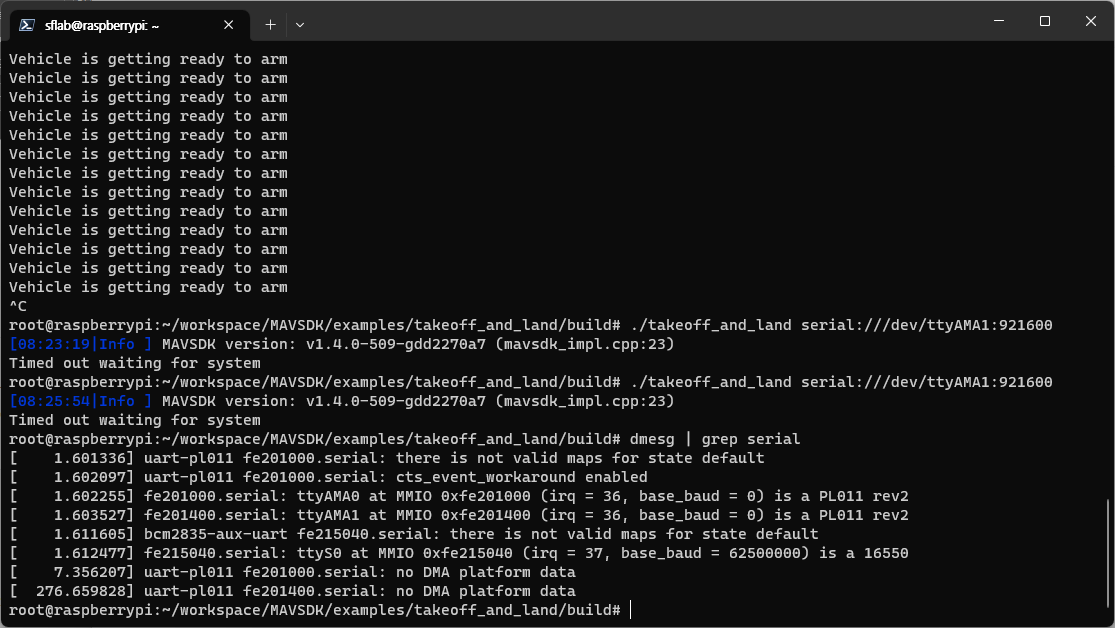
But, it gave me timed out.
Could anyone know how to connect to Pixhawk 6C with Raspberry Pi 4?
Thanks in advance.
This could be a related article, have you checked it out?
Summary Setting up an Ethernet network can feel like assembling a puzzle, and to get all the pieces in place, you need to configure each system to operate on the same IP network. This ensures that each participant has a unique IP address and can find...
Est. reading time: 9 minutes
Thanks for your reply.
Sincerely,
Hi, sorry I think this is more relevant documentation, could you check it out?
PX4 is the Professional Autopilot. Developed by world-class developers from industry and academia, and supported by an active world wide community, it powers all kinds of vehicles from racing and cargo drones through to ground vehicles and...
HI,
Thanks for the reply.
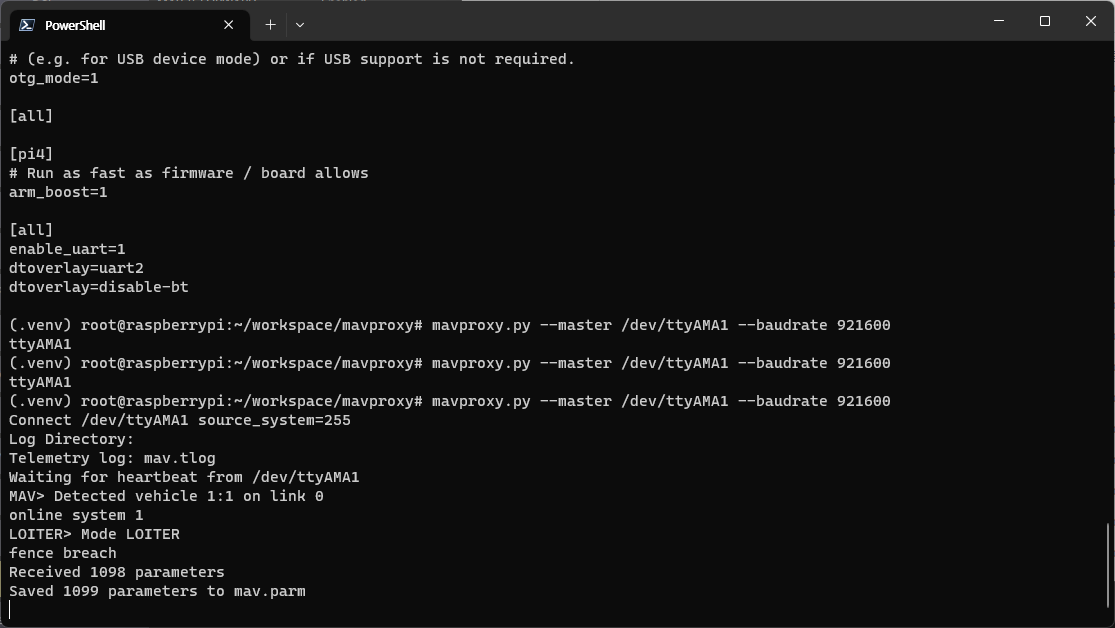
Wiring
PX4 Setup
Ubuntu Setup on RPi
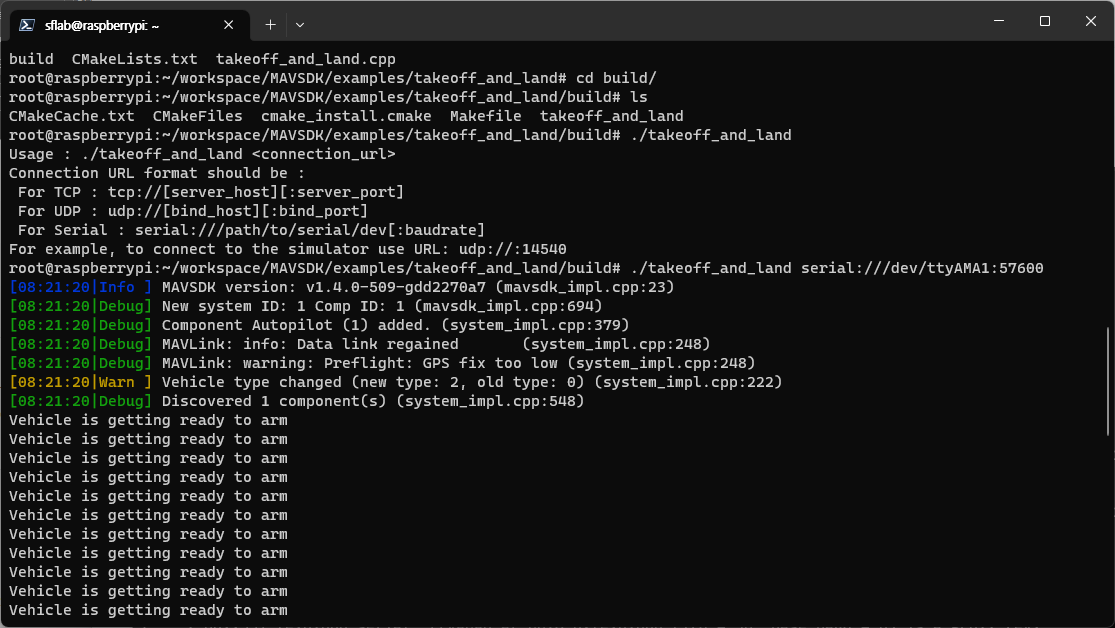
MAVLink Communication
But, still got a ‘Timed out’ result.
Sincerely,
1 Like
Thanks to @junwoo0914 , finally got a connected result.
Build firmware from source, I could upload firmware 1.14, then got connected successfully.
Thanks again.
2 Likes