Hi all,
I’m an undergrad trying to do HITL with actual ESCs and motors. I’ve been trying to implement HITL with the actual actuators moving with PWM Main but have not gotten it to work so far.
I’m using Ubuntu 20.04, Px 6x, and QGC 3.5.6.
Things I’ve tried:
In v1.13 Px4 Repo
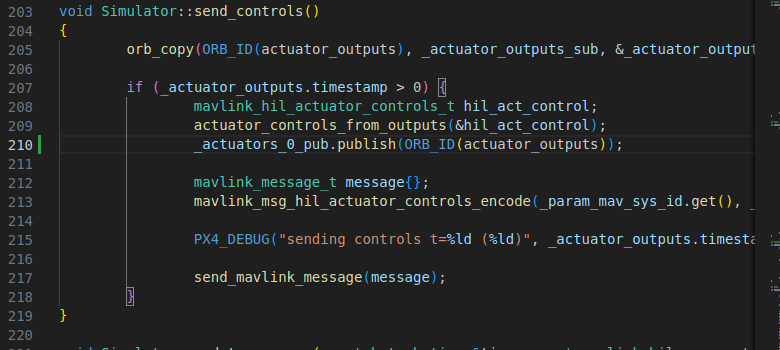
- Fixes from discord in px4fmu_common/init.d/rcS, commander.cpp, and state_machine_helper.cpp (Disable lockdown, set flags as true etc)
https://cdn.discordapp.com/attachments/1093936148021264565/1095742324010659850/image.png?ex=660d7f0f&is=65fb0a0f&hm=eaa882a0fd85daafc009e2115c383d2cea223ec2556b65c48ac6f295915c08ce& - Added CONFIG_MODULES_SIMULATION_PWM_OUT_SIM=y under the default firmware board
I followed the last step https://discuss.px4.io/t/fixed-wing-hitl-with-gazebo/27206/7:
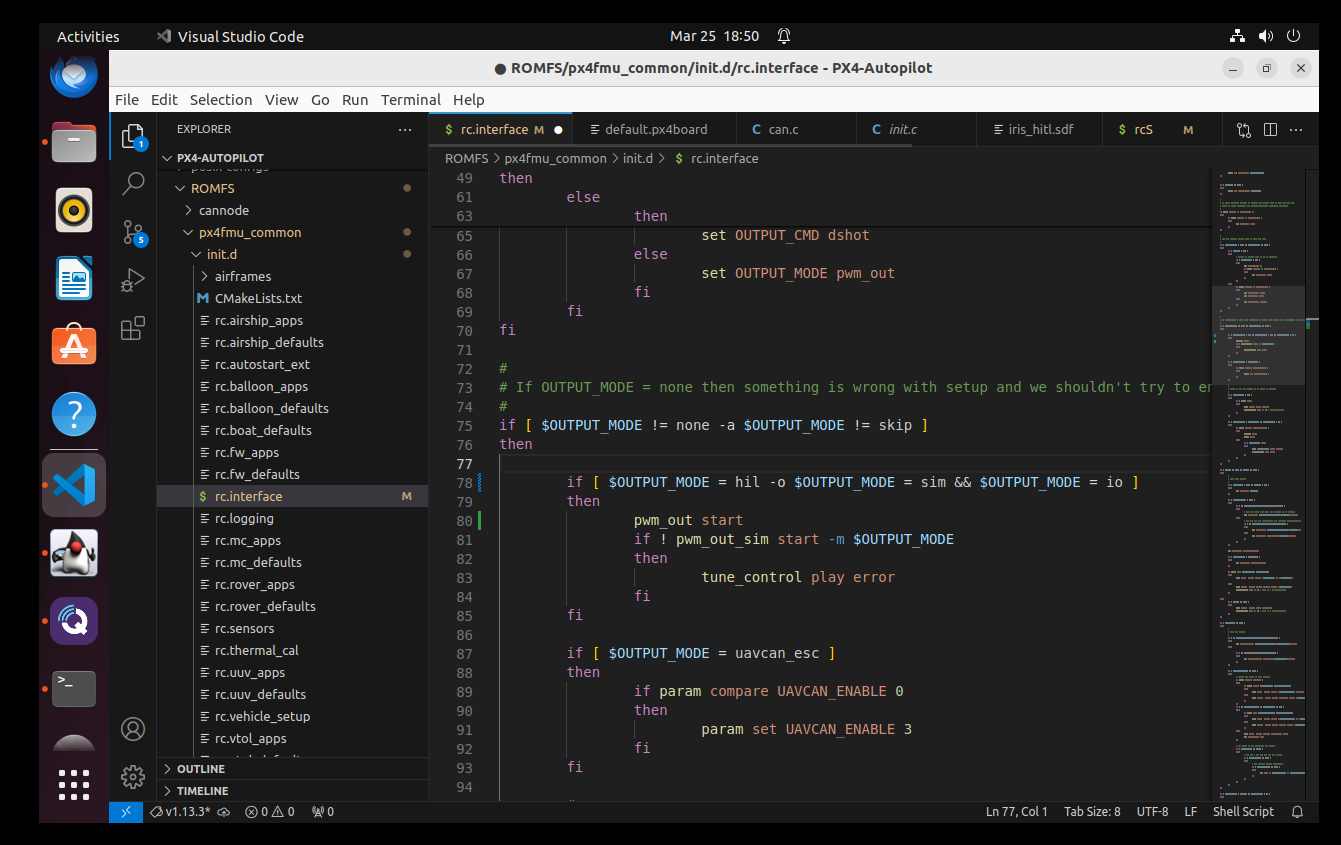
After I’ve added set OUTPUT_MODE pwm_out in *ROMFS/px4fmu_common/init.d/rc.interface, the motors would spin with the HITL Airframe and the HITL disabled but the drone simulation won’t spin.
I managed to get the drone simulation to spin in the simulation and in real life separately, but never together. Has anyone managed to achieve this with v1.13 or v1.14?
I found HITL/HIL: disable lockdown not working · Issue #14069 · PX4/PX4-Autopilot · GitHub and it seems like someone managed to get it to work in v1.11 but the firmware doesn’t build for me.
Other relevant posts I found:
- HIL Simulation with Functional Motors / Actuators
- Motor PWM outputs not working in HIL
- Turn off lockdown in HIL?
If anyone has any idea on how to fix this, I would appreciate it a ton. Thank you!
{kind=link}