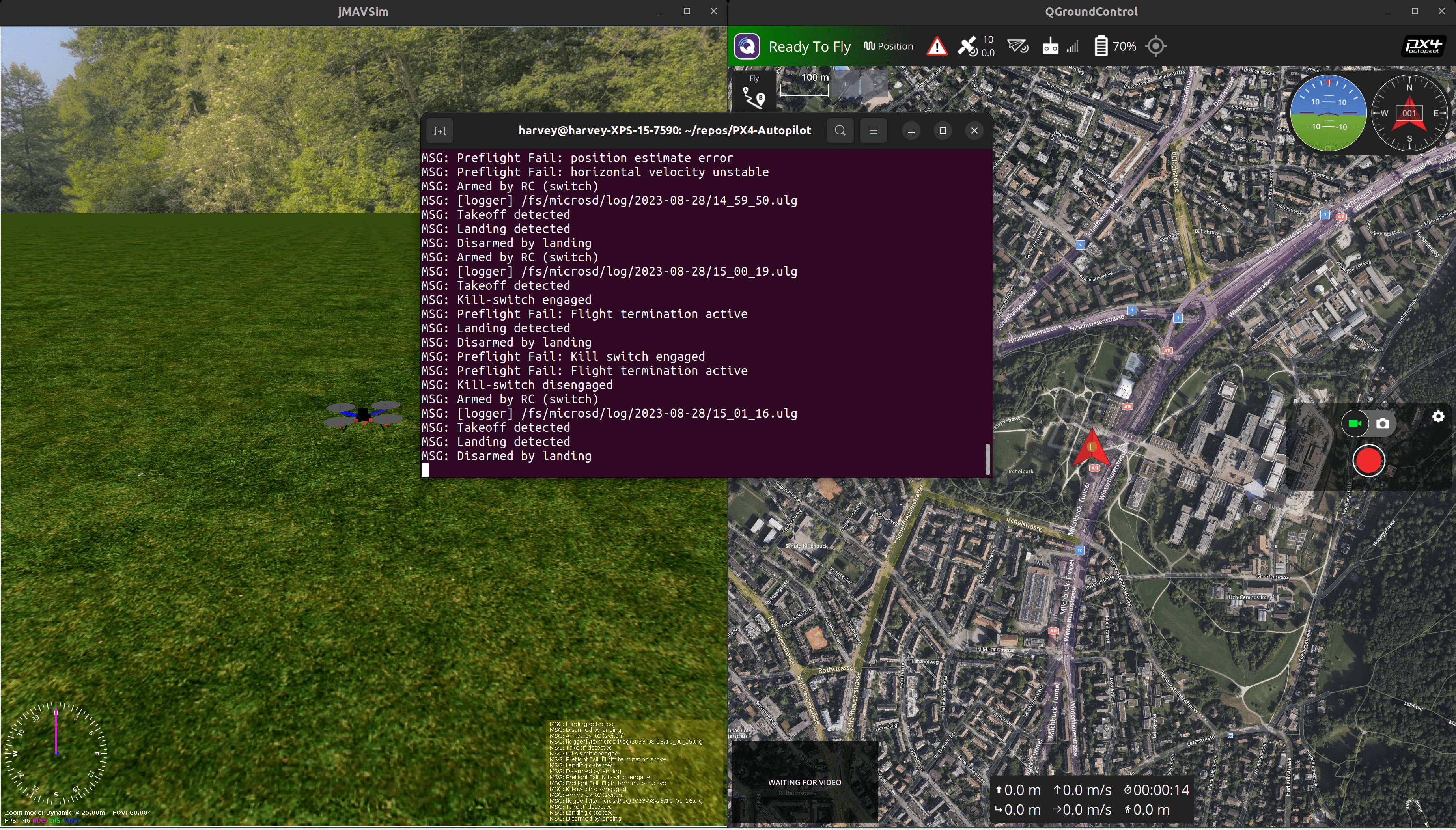
Following the instructions here I was able to get a HITL simulation running in JMavSim in PX4 v1.13.0. However, when I updated to v1.14.0-rc1 (using this commit from the main branch: ecbc5b83a0012b7ca2ca8bb79a694718d70799c5), the RC commands seemed to make it to JMavSim’s console and QGroundControl (could arm, kill and say “takeoff detected” when throttling up), but the drone itself does not move (pic below).
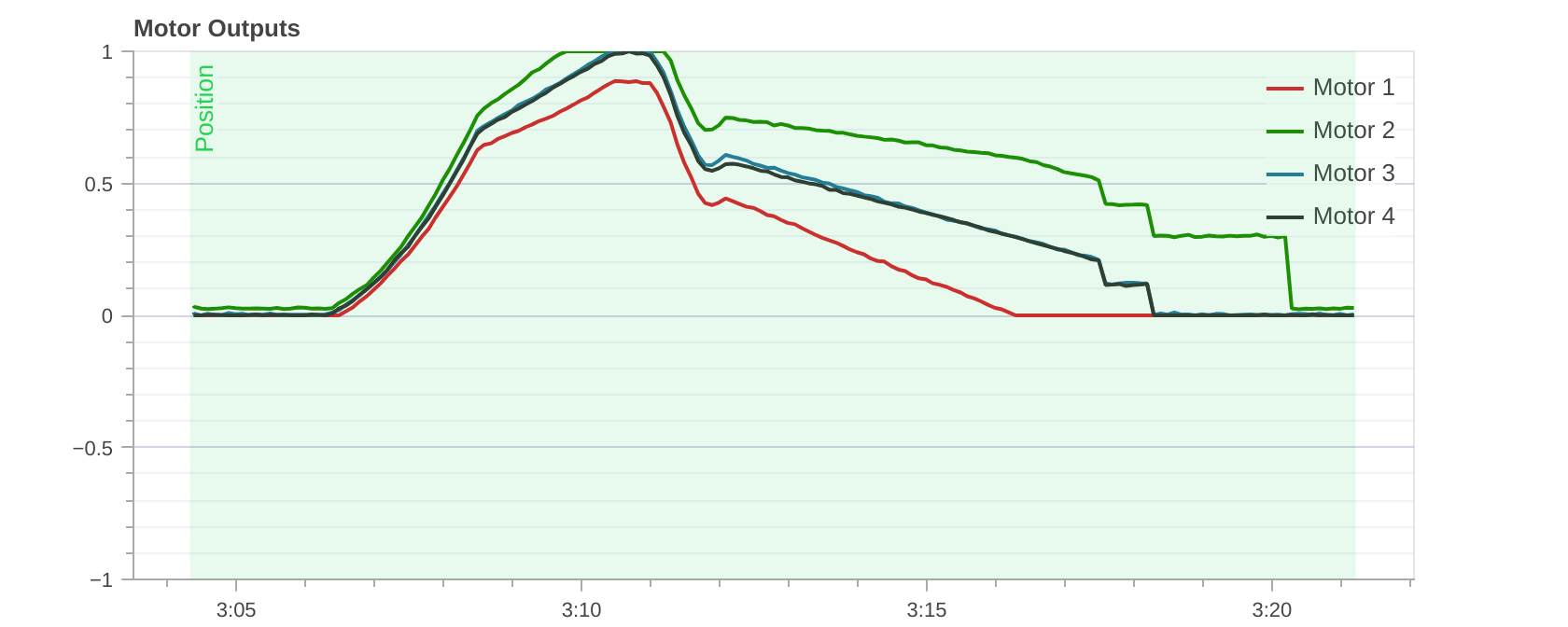
Looking at the logfile, I can see that the RC inputs were received (thrust), as well as pitch and roll changes from direct arrow key inputs to JMavSim. I can also see that the motor outputs were apparently sent (non-zero values in motor output graph - see below), but the drone still didn’t move.
I suspect this has something to do with the new actuator mapping in v1.14.0 (described here) but I can’t figure out what the exact issue is/what I need to modify to make it work. I have read and followed the upgrade instructions and actuator configuration and as such can get the motors spinning on a physical Holybro x500 drone, but just not the HITL one.
I am using the Generic Quadrotor x airframe because I can confirm a correct mapping with the physical x500 (need to use PWM MAIN inputs which are not available with the HIL Quadcopter X).
I suspect this issue may be related to the corresponding Gazebo one here.
Hello.
Did “external HITL” mode work correctly in different environments? For example, v1.13.0?
If successful, could you share your environment such as Firmware version and px4 version?
Hi , Have you solved this problem? This issue also troubles me. I tried to check mavlink messages and I found the ‘HIL_ACTUATOR_CONTROLS’ message not active with v1.14 firmware. So, Maybe that’s the key to the problem.
Hi Guys
I also faced this problem. even in the AirSim simulator I can see mavlink log (e.g. arming, take off detected) but quad does not have any movement!!!
also I tested developer firmware >> NO change.
as I have seen in tutorials, it would be so easy! so I think it may refer to firmware version 1.14
it is worth saying I got an error in QGCS which had said -something like this- : your firmware has bug…
Hi all!
I am almost certain this issue refers to the version of PX4.
I have changed it to 1.13.3 and it works very gentle! (in both jmavsim and airsim)
hi, could you share how you went about doing so? I download v1.13.3 but it seems like only my keyboard works in simulator. It doesn’t seem to work with my RC inputs
I used a different Pixhawk flight computer and I managed to get it to work. I had the the exact same problem as before where the drone does not move at all, but everything works after I use the cube black.