Hey all.
I’ve flown multiple flights with QGC in position and mission mode, using a drone with GPS. I am trying to replay these flights using Px4 SITL as if they flew without GPS. Specifically, I would like to produce the outputs of the EKF2 and other topics (VehicleAcceleration, VehicleAngularVelocity, VehicleAttitude, etc) as though Px4 did not have access to a GPS source.
As a first step, I want to confirm that I could successfully replay a ulog file with GPS and have the replayed output match the original ulog file. I am trying to identify the list of input topics that the replay module should be able to publish in the restrict_topics section of the orb_publisher.rules file. For example, topics like sensor_combined, sensor_accel, sensor_mag, sensor_baro, sensor_gps, etc should published by the replay module, as they serve as inputs to the EKF and other modules that estimate output states of the drone (e.g. VehicleAttitude, VehicleAngularVelocity). I’ve also included topics like vehicle_command, and vehicle_land_detected which are inputs to the EKF. I’ve tried many different combinations of these inputs, however, whenever I replay my flight, I can’t get my replayed flight to look like the original flight, even when I allow sensor_gps as an input. Please advise how I can reproduce the flight from the sensors and other inputs from my ulog file for the ultimate purpose of replaying a flight without GPS inputs.
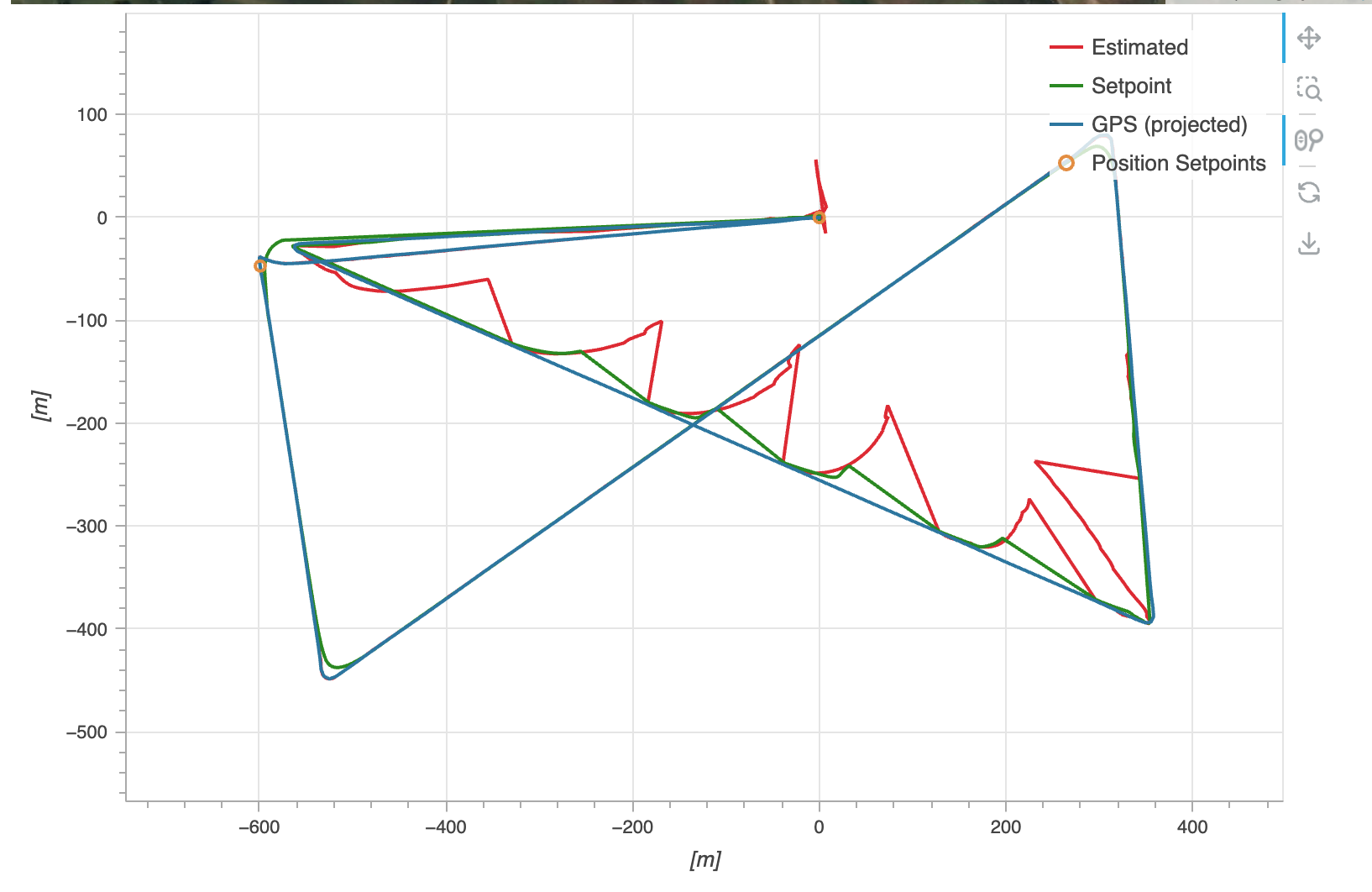
Here are the erroneous outputs for my vehicle_local_position.
I attached the pdf of my flight review below. It was replayed with the following orb_publisher.rules file
restrict_topics: vehicle_command_ack,vehicle_command,vehicle_control_mode,vehicle_constraints,vehicle_status,battery_status,manual_control_setpoints,
vehicle_air_data,vehicle_land_detected,sensor_combined,sensor_accel,sensor_mag,sensor_correction,sensor_baro,sensor_gps,sensor_gyro,sensor_selection
module: replay
ignore_others: true
and the following replay_params.txt file
EKF2_MULTI_IMU 0
EKF2_MULTI_MAG 0
SENS_IMU_MODE 1
SENS_MAG_MODE 1
Flight Review - Quadrotor.pdf (2.7 MB)
I am also pasting the output of the ulog_info command of my original flight, which shows the list of topics in the original log (before replay):
Logging start time: 0:46:36, duration: 0:05:20
No Dropouts
Info Messages:
metadata_events_sha256: 8800bfc717b6f8413409767d451746a5753f9052a98215f659bdd583fac4ce90
sys_mcu: STM32H7[4|5]xxx, rev. V
sys_name: PX4
sys_os_name: NuttX
sys_os_ver: 6fdb755a5d776de3017aa874a5e204dd1903054e
sys_os_ver_release: 184549631
sys_toolchain: GNU GCC
sys_toolchain_ver: 9.3.1 20200408 (release)
sys_uuid: 000600000000303138333430510e0035001a
time_ref_utc: 0
ver_data_format: 2
ver_hw: CUBEPILOT_CUBEORANGE
ver_sw: f03c26b922c52ef7d90927570878cfe9c3b075fe
ver_sw_branch: main
ver_sw_release: 17694720
Info Multiple Messages: [boot_console_output: 1], [excluded_optional_topics: 35], [metadata_events: 1], [perf_counter_postflight: 1], [perf_counter_preflight: 1], [perf_top_postflight: 1], [perf_top_preflight: 1]
Name (multi id, message size in bytes) number of data points, total bytes
actuator_armed (0, 15) 639 9585
actuator_controls_status_0 (0, 20) 641 12820
actuator_motors (0, 66) 80175 5291550
actuator_outputs (0, 76) 3209 243884
battery_status (0, 167) 1605 268035
config_overrides (0, 14) 638 8932
control_allocator_status (0, 52) 52433 2726516
cpuload (0, 16) 643 10288
estimator_attitude (0, 49) 16037 785813
estimator_attitude (1, 49) 16037 785813
estimator_baro_bias (0, 40) 641 25640
estimator_baro_bias (1, 40) 641 25640
estimator_event_flags (0, 53) 319 16907
estimator_event_flags (1, 53) 320 16960
estimator_global_position (0, 60) 320 19200
estimator_global_position (1, 60) 320 19200
estimator_gps_status (0, 39) 320 12480
estimator_gps_status (1, 39) 320 12480
estimator_innovation_test_ratios (0, 148) 641 94868
estimator_innovation_test_ratios (1, 148) 641 94868
estimator_innovation_variances (0, 148) 641 94868
estimator_innovation_variances (1, 148) 641 94868
estimator_innovations (0, 148) 641 94868
estimator_innovations (1, 148) 641 94868
estimator_local_position (0, 179) 16037 2870623
estimator_local_position (1, 179) 16037 2870623
estimator_selector_status (0, 153) 327 50031
estimator_sensor_bias (0, 118) 566 66788
estimator_sensor_bias (1, 118) 572 67496
estimator_states (0, 205) 320 65600
estimator_states (1, 205) 320 65600
estimator_status (0, 130) 1605 208650
estimator_status (1, 130) 1605 208650
estimator_status_flags (0, 95) 405 38475
estimator_status_flags (1, 95) 415 39425
estimator_wind (0, 48) 320 15360
estimator_wind (1, 48) 320 15360
event (0, 40) 18 720
failsafe_flags (0, 85) 584 49640
failure_detector_status (0, 22) 639 14058
home_position (0, 52) 4 208
hover_thrust_estimate (0, 41) 3149 129109
input_rc (0, 71) 641 45511
landing_gear (0, 9) 2 18
magnetometer_bias_estimate (0, 64) 7 448
manual_control_setpoint (0, 63) 1605 101115
manual_control_switches (0, 31) 319 9889
mission_result (0, 38) 9 342
navigator_mission_item (0, 51) 8 408
parameter_update (0, 34) 1 34
position_setpoint_triplet (0, 248) 17 4216
rate_ctrl_status (0, 24) 80175 1924200
rtl_time_estimate (0, 17) 236 4012
sensor_accel (0, 44) 320 14080
sensor_accel (1, 44) 320 14080
sensor_baro (0, 32) 320 10240
sensor_combined (0, 48) 67344 3232512
sensor_gps (0, 142) 320 45440
sensor_gyro (0, 44) 320 14080
sensor_gyro (1, 44) 320 14080
sensor_mag (0, 40) 320 12800
sensor_selection (0, 16) 1 16
sensors_status_imu (0, 96) 1605 154080
takeoff_status (0, 13) 10 130
telemetry_status (0, 86) 320 27520
telemetry_status (1, 86) 320 27520
trajectory_setpoint (0, 64) 1605 102720
vehicle_acceleration (0, 28) 6416 179648
vehicle_air_data (0, 41) 1605 65805
vehicle_angular_velocity (0, 40) 91624 3664960
vehicle_attitude (0, 49) 6416 314384
vehicle_attitude_setpoint (0, 54) 6416 346464
vehicle_command (0, 55) 9 495
vehicle_command_ack (0, 22) 3 66
vehicle_constraints (0, 17) 320 5440
vehicle_control_mode (0, 23) 639 14697
vehicle_global_position (0, 60) 1605 96300
vehicle_gps_position (0, 142) 3206 455252
vehicle_imu (0, 56) 641 35896
vehicle_imu (1, 56) 641 35896
vehicle_imu_status (0, 132) 320 42240
vehicle_imu_status (1, 132) 320 42240
vehicle_land_detected (0, 20) 327 6540
vehicle_local_position (0, 179) 16037 2870623
vehicle_local_position_setpoint (0, 64) 3209 205376
vehicle_magnetometer (0, 33) 641 21153
vehicle_rates_setpoint (0, 33) 67333 2221989
vehicle_status (0, 76) 639 48564
vehicle_thrust_setpoint (0, 28) 80175 2244900
vehicle_torque_setpoint (0, 28) 80175 2244900
wind (0, 48) 320 15360
yaw_estimator_status (0, 105) 320 33600
yaw_estimator_status (1, 105) 320 33600
Thanks for your help, I really appreciate it.