Hi,
we are using the PX4 firmware v1.14. We are flying the Pixhawk purely as a sensor, it does not control motors.
As an aside, since it might be important, we are not arming the Pixhawk and we chose the “Quadrotor x/Generic Quadcopter” as an airframe as none of the airframes really corresponds to our wing.
After some time of flying, we are experiencing very wrong estimations (for all values) and we are not sure what’s going on. We tried to replay the ulog to see if we can a) reproduce the issue in simulation and b) tune the EKF parameters to avoid the bad estimations. Unfortunately, the replay without changing any parameters is already not reproducing the estimations we have in the ulog.
orb_publisher.rules
restrict_topics: sensor_combined, vehicle_gps_position, vehicle_land_detected, vehicle_global_position
module: replay
ignore_others: true
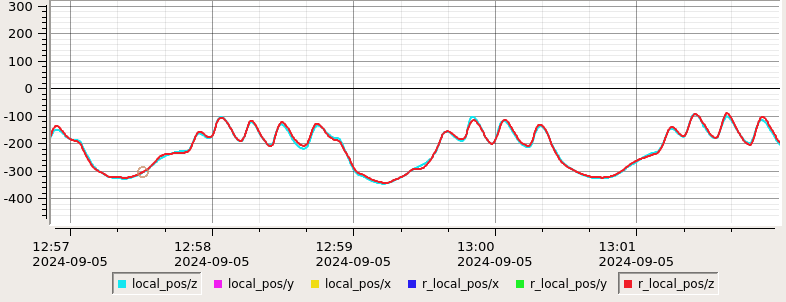
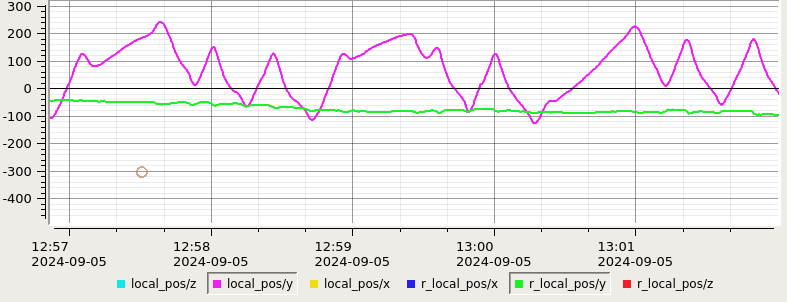
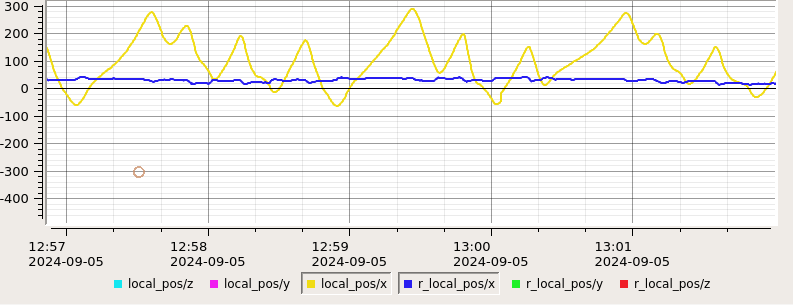
Here is an example of the local position comparison from the actual flight vs the replay (prefixed with r_), the altitude (z) seems to be reproduced mostly correctly, the xy position not:
What could cause this difference? What could we be doing wrong in the replay setup that we don’t get the same results when we supply the same parameters?