Hello everyone,
I have a problem with the reproducibility of the log data, as they do not agree among the flights with my drone (Holybro QAV250, Pixhawk 4 Mini). For me it is very important that the data (especially of the accelerations) are consistent.
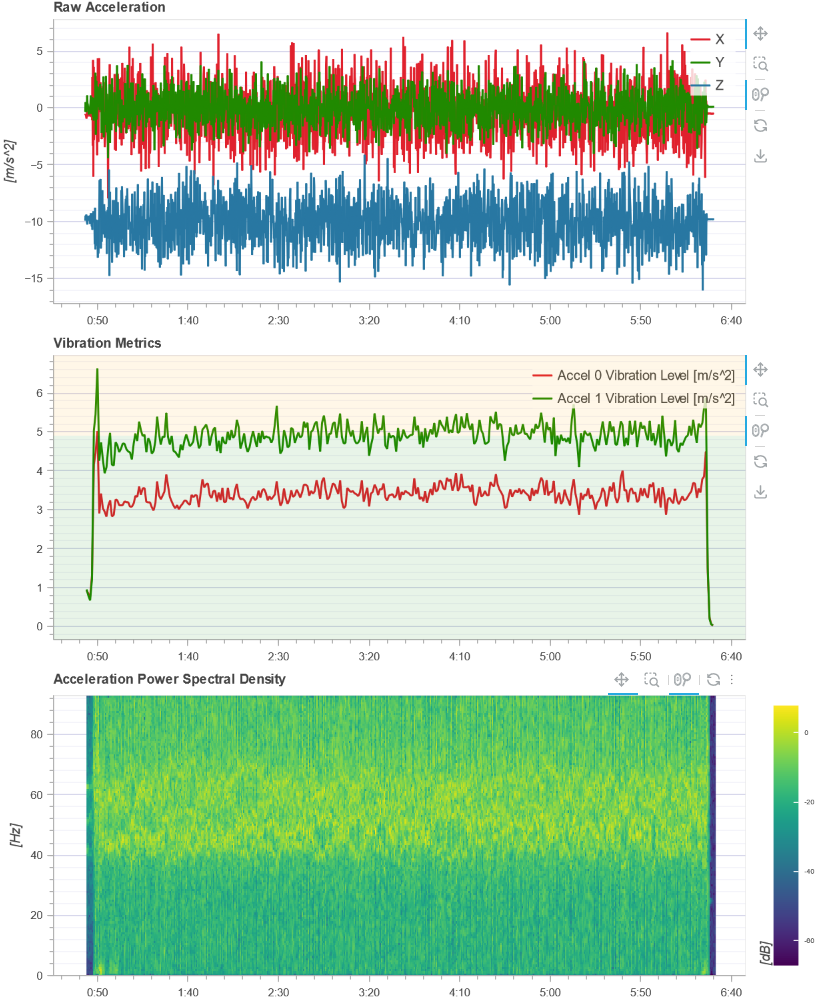
For my problem analysis, I have performed a number of test flights where I simply hovered with the drone. I performed 12 of these flights (6 flights of approx. 5 minutes and 6 flights of approx. 3 minutes hover) indoors, i.e. without wind influence, and 3 flights of approx. 10 minutes hover each and outdoors under 3-4 m/s wind. I did not make any adjustments to the parameters / software / hardware setup between the flights. I only replaced the battery with a charged, identical battery every 10-15 minutes flight time. No difference in flight behavior is visible between the flights, but the log data is not entirely consistent. They split into two different cases which occur pretty much 50:50 of the flights: In one case the Accelerometer Power Spectral Density is very noisy, in the other case it looks normal:
Case 1 (noisy):
Case 2 (normal):
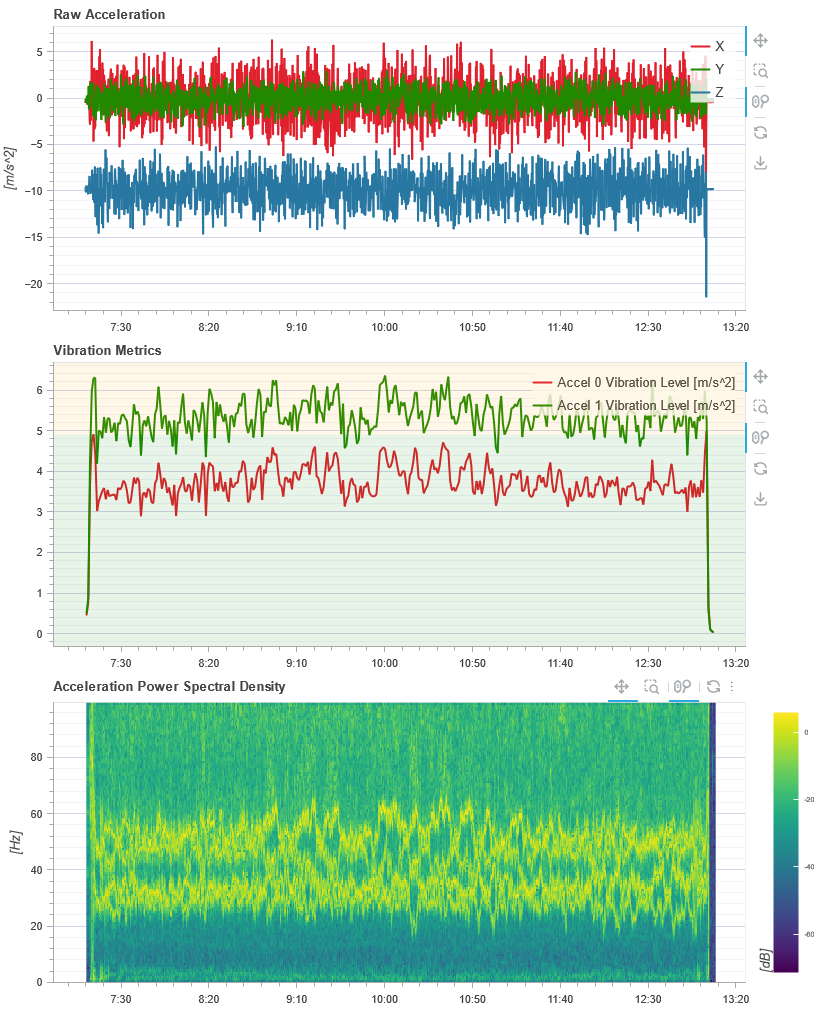
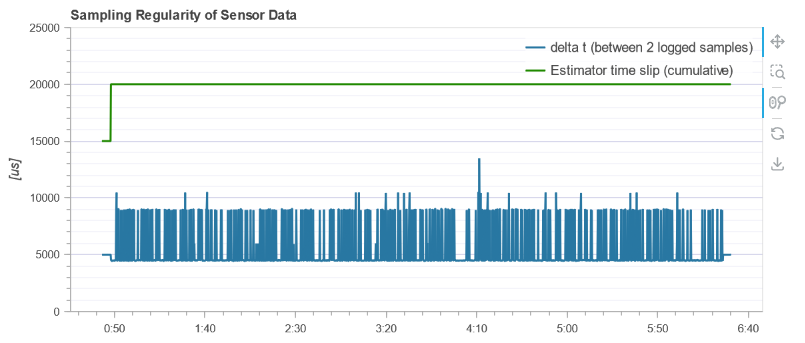
When which case occurs in the test series is not systematic or regular, it seems random. When analyzing the data, I noticed that logging delays occur in the case of the noisy PSDs, while no delays occur in the normal data:
Case 1 (noisy):
Case 2 (normal):
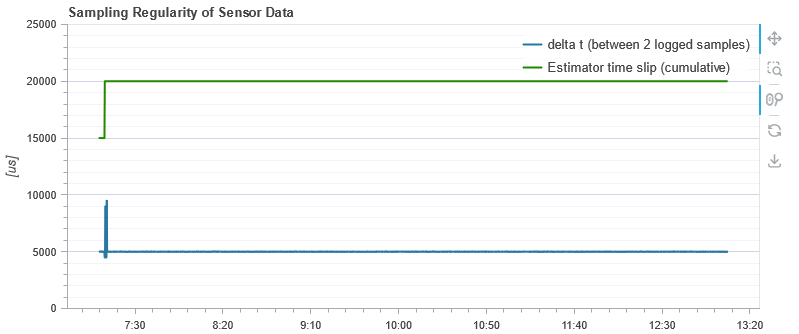
Either these delays are a symptom of another problem (which I can’t identify from the data), or there is some kind of aliasing effect from the delays, which is why the data appears noisy. At this point it should be mentioned that I am forced to fly with PX4 v1.14 and have always used v1.10 before. With v1.10 these problems never occurred and the log files were only about half the size.
The problem also occurs when I use a different UAS for the cross check, which has the same PX4 release, the exact same hardware and the same parameters (apart from sensor calibration, metadata, log files already saved on the SD card).
I do not understand why this is happening. Why is the logging under v1.14 not consistent for different flights without any difference in the UAS setup? How can I fix this problem?
Many thanks in advance!!