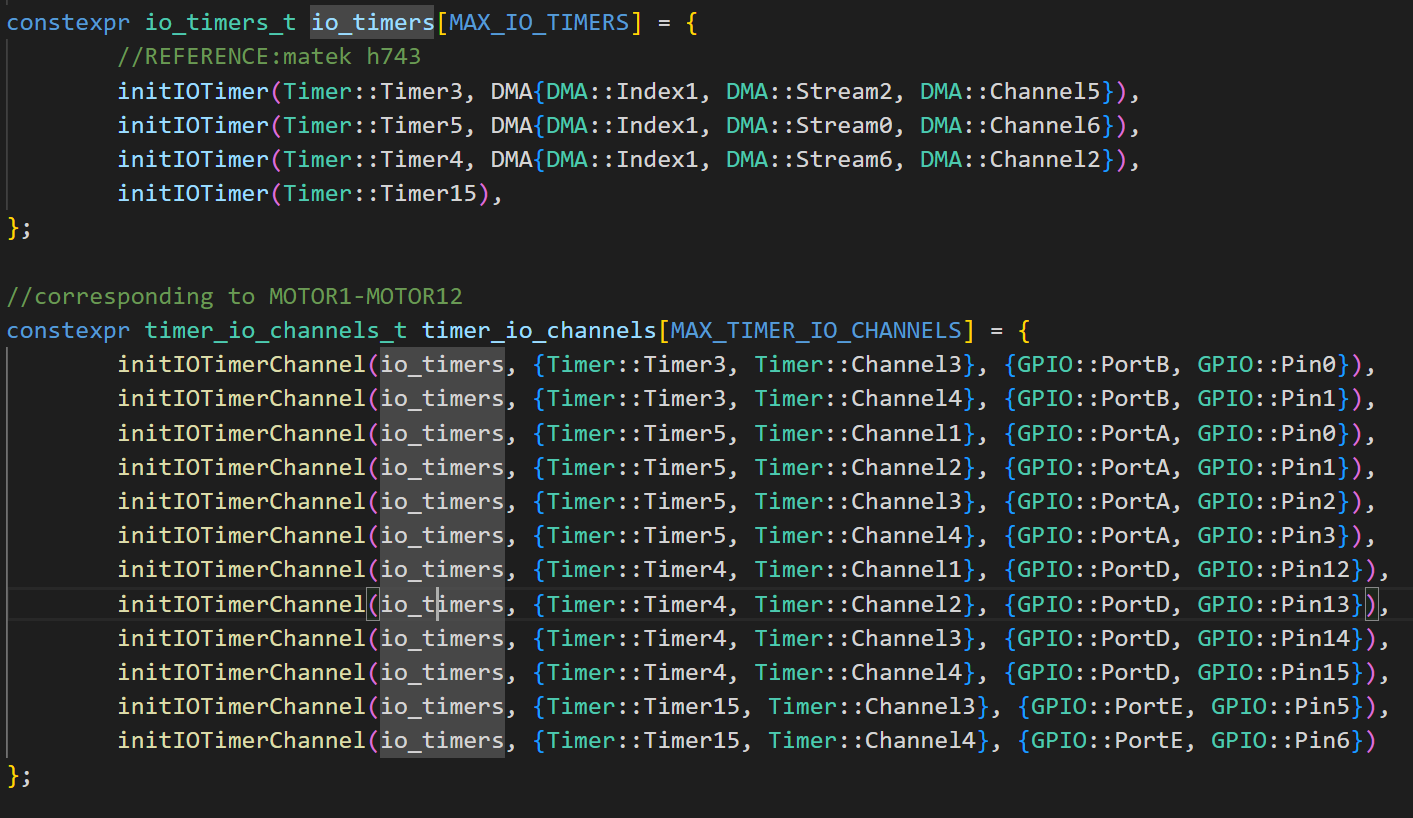
Hello everyone, we have made a px4 board based on STM32H743, its pinmap is also similar with Matek-h743-slim, we have the same IoTimerChannels setting.
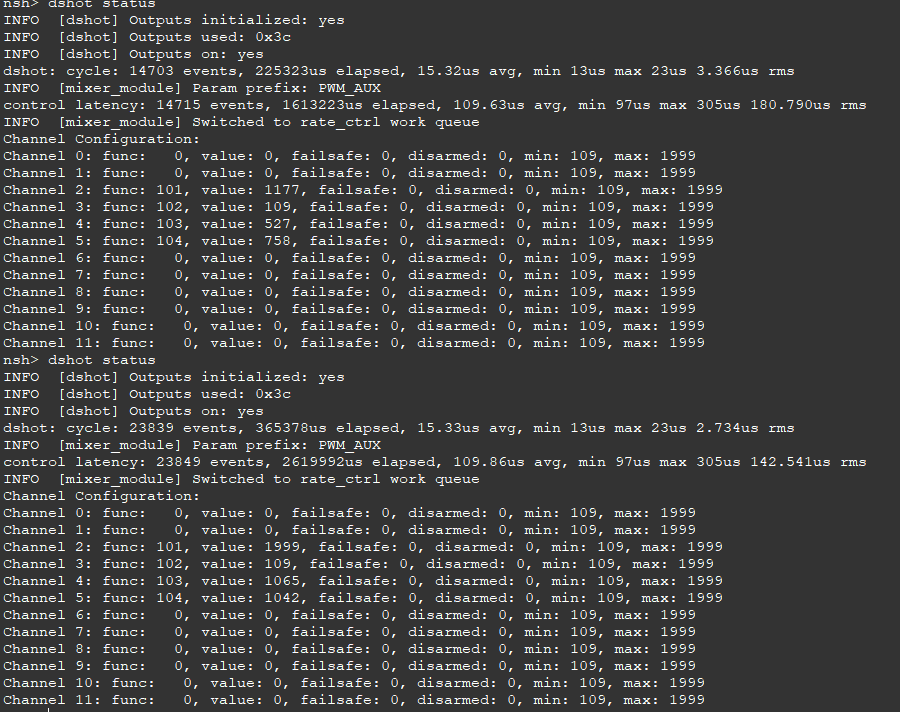
But when we armed the drone, the outputs of actuators are different both in PWM400Hz and DShot600. As you can see, four output channels generates different values.
//pwm400 [timer 4] at middle throttle

//dshot600 [timer 5] at middle throttle and max throttle
Besides, the ESC didn’t feedback the ack alarm after power supporting alarm. Is our system clock setting wrong or gpio setting incorrect?
Could anyone can help me? Thanks very much!!!
