Hello,
I am following the documentation on v1.10.0 to setup DSHOT 600 for my current setup. However, the signal traced from M1 on Power management still looks like a PWM to me.
Current setup:
I have the Radio, FMU, PM, RC, and ground station configured and working. I can arm move the throttle and monitor M1 changes on my scope.
DSHOT Setup:
I used v1.10.0 tag and flashed to FMU.
I modified DSHOT_CONFIG 600 3 ways:
Using rcS file prior to flashing
Using parameter function on ground station
Using an airframe mixer pair that predefined DSHOT CONFIG
In all 3 instances I can verify that DSHOT_CONFIG is showing the right value however the scope shows PWM and not DSHOT protocol.
I would appreciate any suggestions that you might have.
Thanks.
Hi,
What is your ESC? I have the same issues, but you seem to be ahead of me. I am using Holybro Tekko32 ESCs and their PMB. Each ESC also has a “TX” telemetry pin on them. I am trying to use the Dshot setting on the “QGroundControl” Parameter setting, but the physical connection/port setting is not working on MavLink and the Pixhawk-4. Please let me know. Thanks.
Did you set SYS_USE_IO=0 and use AUX as if it was MAIN (as explained in DShot ESCs | PX4 User Guide. I use Pixhawk 4 with dshot1200 ESCs and it works great.
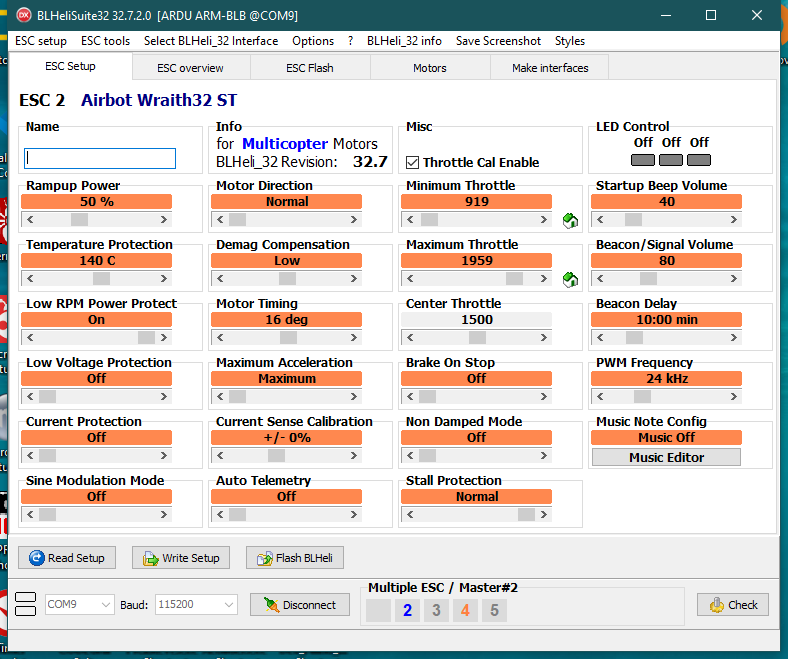
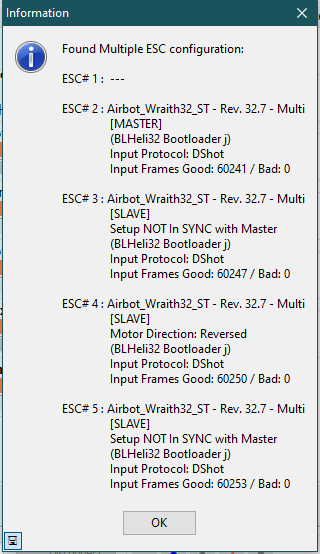
I have installed Ardupilot since and configured and connected to the AUX/FMU side on the PM07 Power board. I ran BLHELI32, but it skipps the motor#1. See below messages and what BlHeli32 shows now. I’ll check on the SYS_USE_IO=0 param as well. Thank you for your input.