Hello. I am newly working pixkhawk and trying to connect two cameras to pixhawk.
In ~px4_ws/Firmware/src/drivers/camera_trigger/camera_trigger_params.c, I have
PARAM_DEFINE_INT32(TRIG_INTERFACE, 4);
PARAM_DEFINE_FLOAT(TRIG_INTERVAL, 50.0f);
PARAM_DEFINE_INT32(TRIG_POLARITY, 0);
PARAM_DEFINE_FLOAT(TRIG_ACT_TIME, 50.0f);
PARAM_DEFINE_INT32(TRIG_MODE, 1);
PARAM_DEFINE_INT32(TRIG_PINS, 56);
PARAM_DEFINE_FLOAT(TRIG_DISTANCE, 25.0f);
and a couple of timestamps and frame numbers are (using rostopic echo /mavros/cam_imu_sync/cam_imu_stamp),
frame_stamp:
secs: 1497372502
nsecs: 671341616
frame_seq_id: 408
frame_stamp:
secs: 1497372502
nsecs: 721236896
frame_seq_id: 409
frame_stamp:
secs: 1497372502
nsecs: 771237896
frame_seq_id: 410
frame_stamp:
secs: 1497372502
nsecs: 820298912
frame_seq_id: 411
frame_stamp:
secs: 1497372502
nsecs: 870298912
frame_seq_id: 412
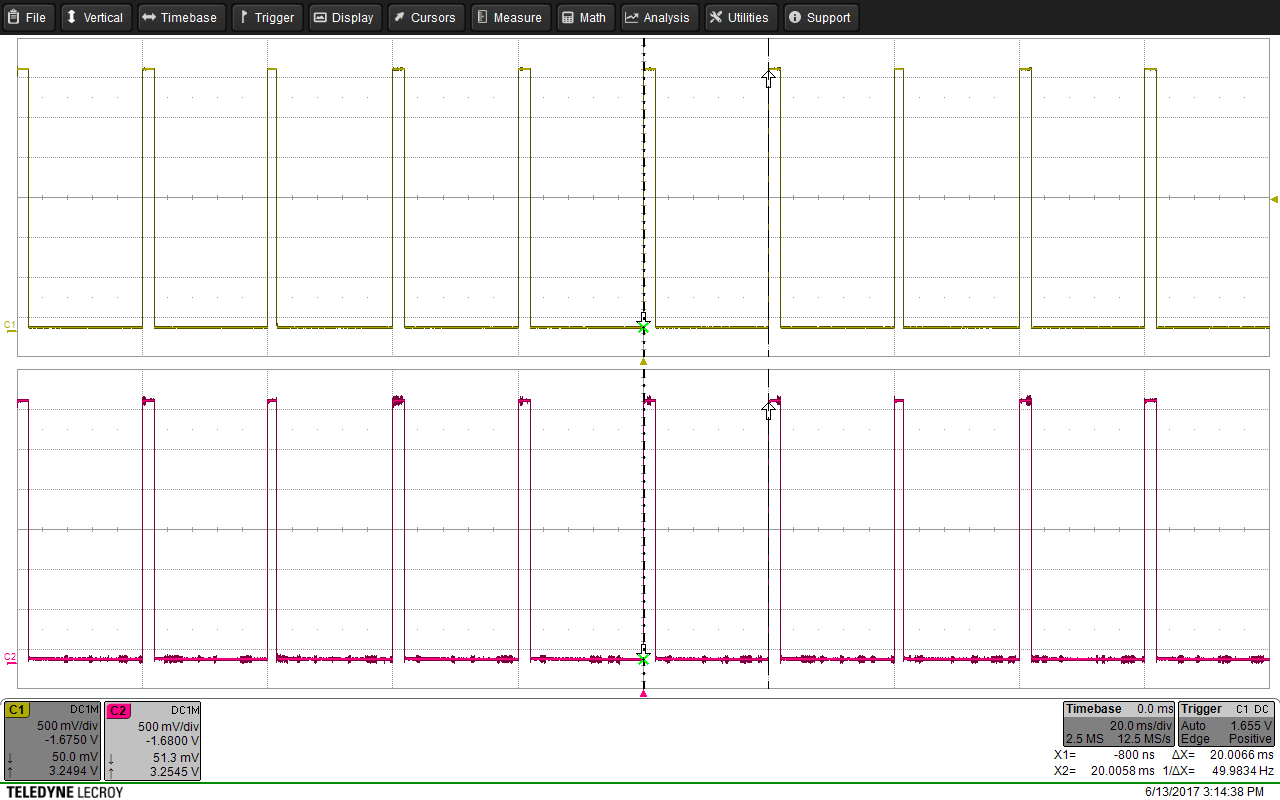
But I hooked up pin 5 and 6 to the scope and both channel showed 20ms (50 Hz) pulse trains. Thus, if the pulses are from trigger PWM, I should be able to echo a 100 Hz data. Am I correct?
Then, how can I actually control the interval of pwm signals?