Hi folks,
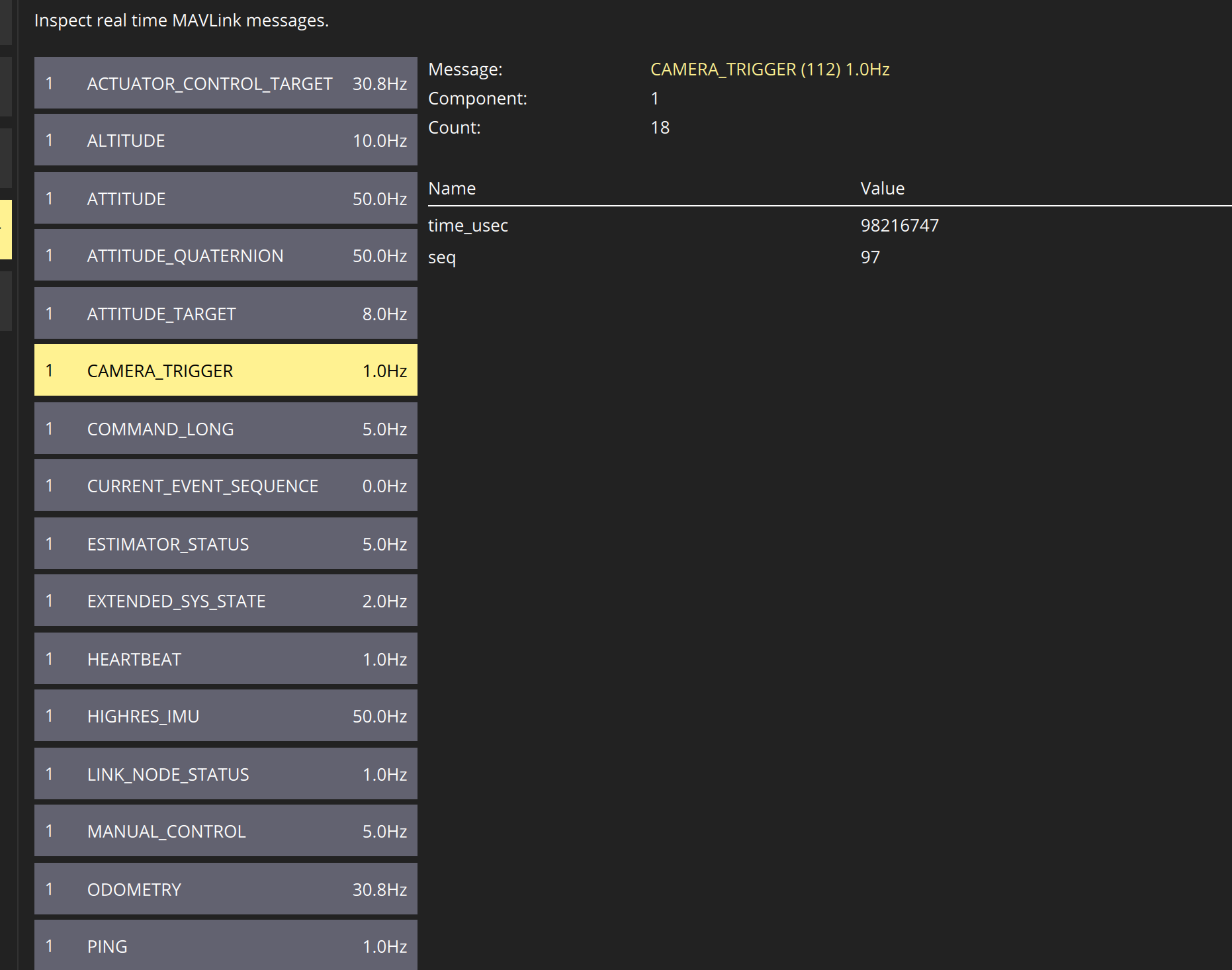
I’m trying to set the camera trigger pins to synchronize camera frames with the IMU data. The NXP flight controller that I’m using has no AUX pins. However according to the documentation) “a controller that only has an FMU, the pins map to MAIN outputs (e.g. Pixhawk 4 mini, CUAV v5 nano)” so I set the TRIG_PINS to 56 and expect to get the trigger signals on pins 5 and 6. I can see the message is being sent in Mavlink Inspector and I also see the /mavros/cam_imu_sync/cam_imu_stamp message in ROS but there is no trigger signal on pins 5 or 6 of the flight controller.
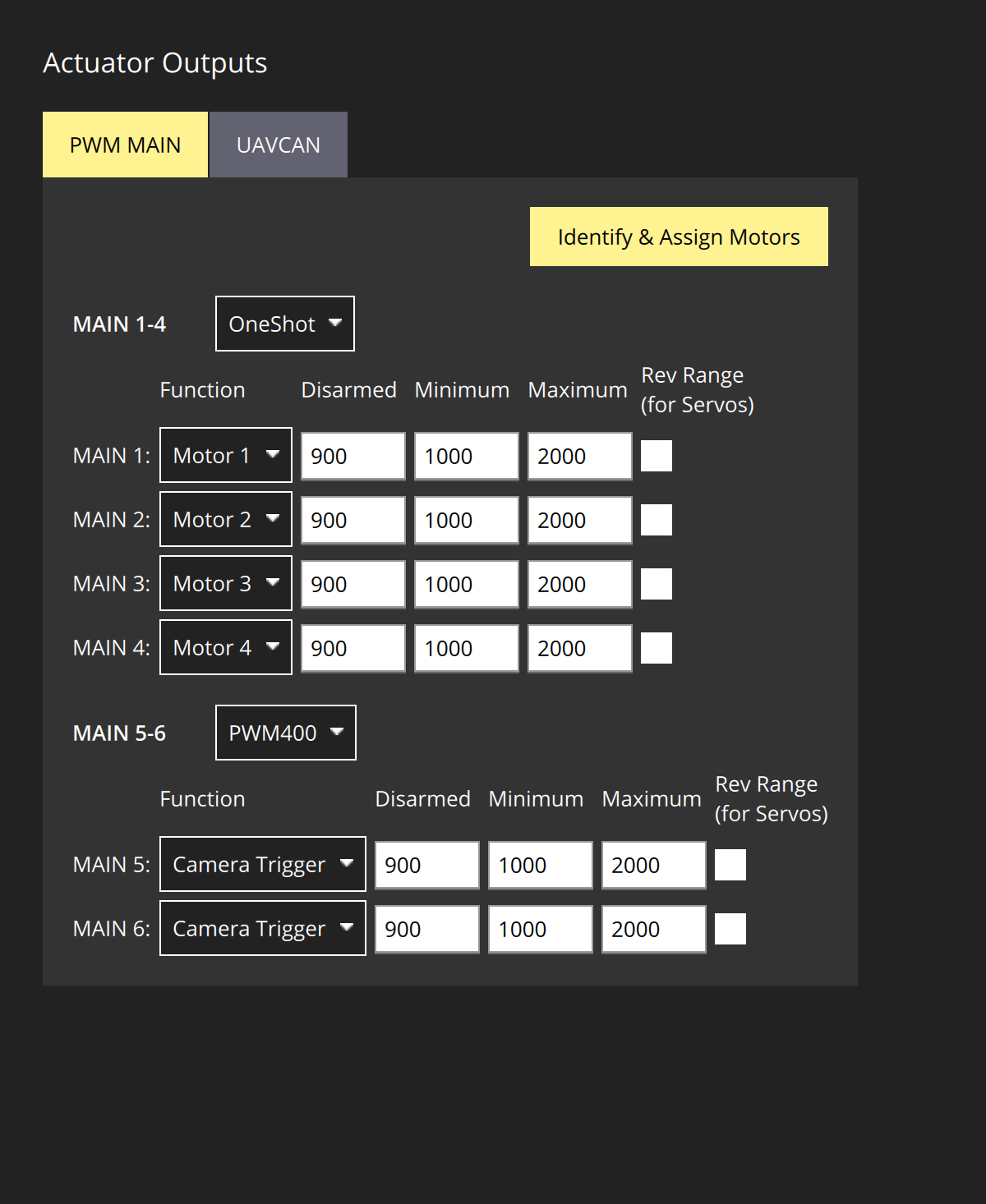
I then tried the dynamic control allocation by setting the SYS_CTRL_ALLOC=1. Here I can set the MAIN pins 5 and 6 to camera trigger but I have got the exact same problem as above.
Any idea what might be causing this problem?
Screenshots: