Hello,
I’m trying to fly a fixed-wing aircraft using Pixhawk 2.4.8 with PX4 firmware through QGroundControl. I’ve done most of the setup and calibrations, but I’m stuck at a point where the motor does not respond during mission execution or takeoff mode, even though everything works fine in actuator testing.
My Aircraft Setup:
- Fixed-wing aircraft with a T-tail configuration
- Two ailerons, one on each main wing, working in opposite directions (for roll)
- Two elevetrons at the tail, working in the same direction (for pitch)
- One rudder for yaw control
- Two motors mounted on each main wing (currently testing with one motor connected)
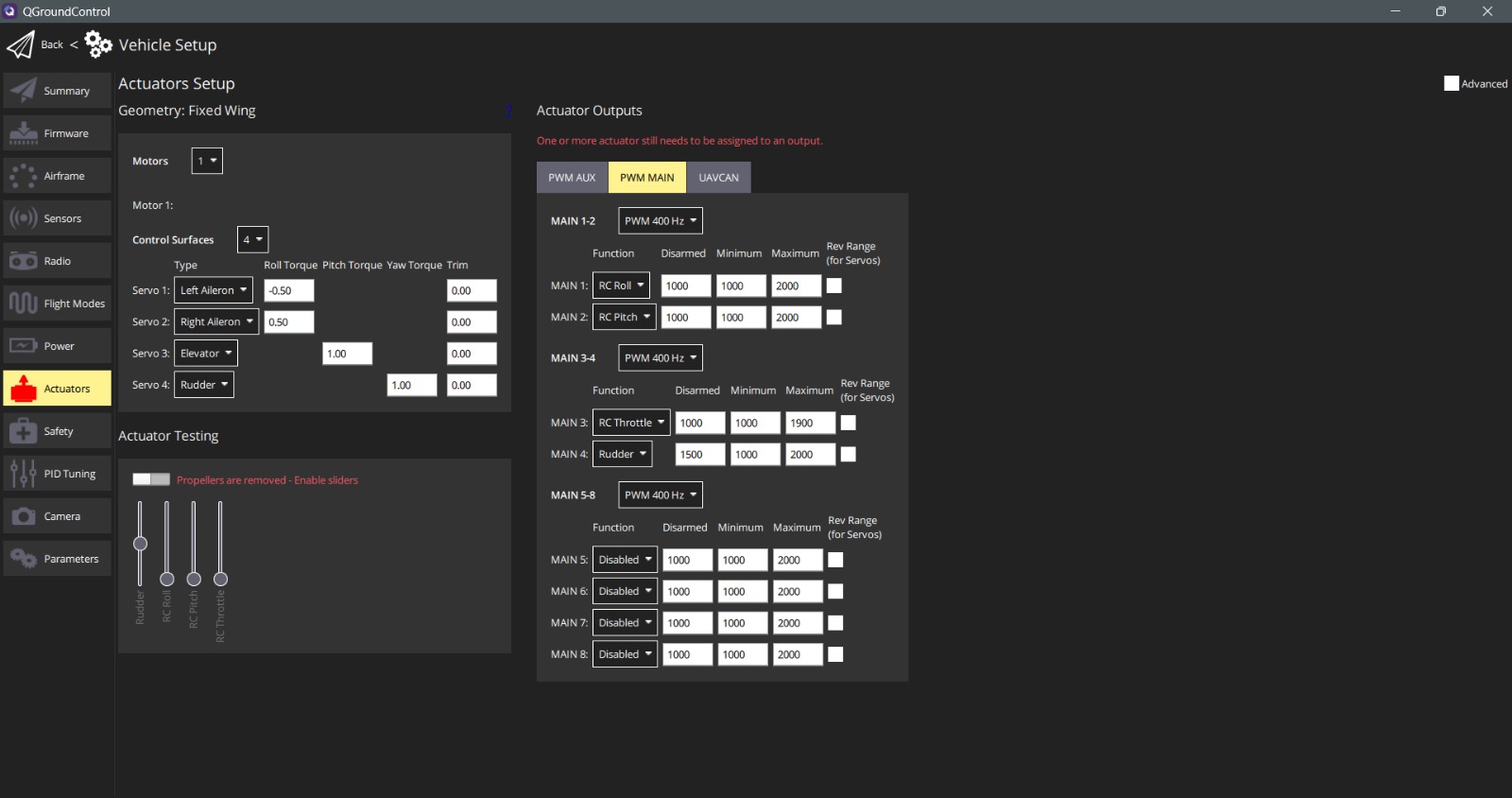
QGroundControl Assignments:
- MAIN1 → Aileron
- MAIN2 → Elevator (elevetrons)
- MAIN3 → ESC (Throttle)
- MAIN4 → Rudder
Control surfaces and motor behave correctly during Actuator Testing, including throttle movement—motor spins fine there.
The Problem:
- When I arm the aircraft and start a Mission or enter Takeoff mode, the motor (MAIN3) does not spin at all.
- The aircraft arms successfully, control surfaces respond, but there’s no power to the motor.
- In Actuator Test, throttle slider moves and the motor works, so I know wiring and ESC setup are fine.
What I Need Help With:
- Are there any specific parameters that might block throttle during autonomous modes like Takeoff or Mission?
- Could
PWM_MIN,PWM_MAX, orDisarmedvalues affect motor behavior in this case? - Is there any setting that I’m missing for throttle to activate properly in flight modes?
- Any PX4-specific setup I should check to allow throttle output in auto modes?
LOG:https://review.px4.io/plot_app?log=8ff3c317-44d0-4135-92e4-e01e02aadcae
Thanks in advance for your help.