I run the machine learning on the simulation
There is QGroundControl and
roslaunch px4 mavros_posix_sitl.launch
After running 184 times flying python script on PX4-autopilot
cd px-ws/src/PX4-Autopilot/integrationtests/python_src/px4_it/mavros/
python2 mavros_offboard_posctl_test.py
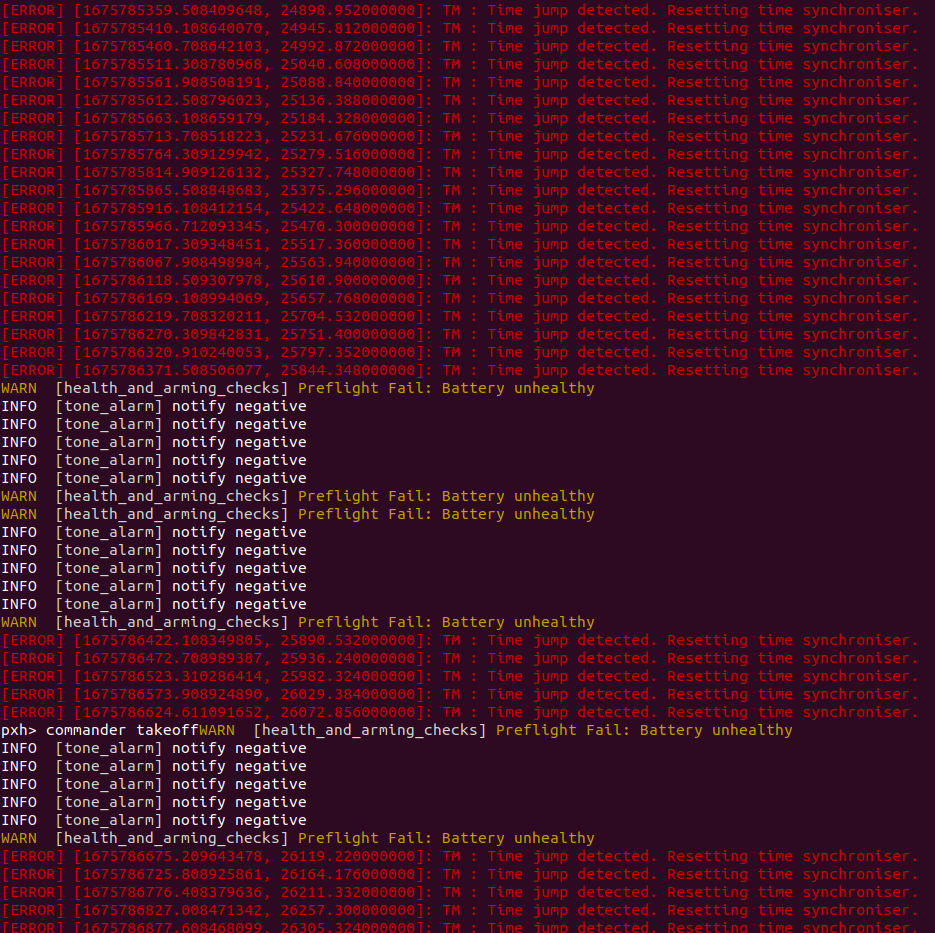
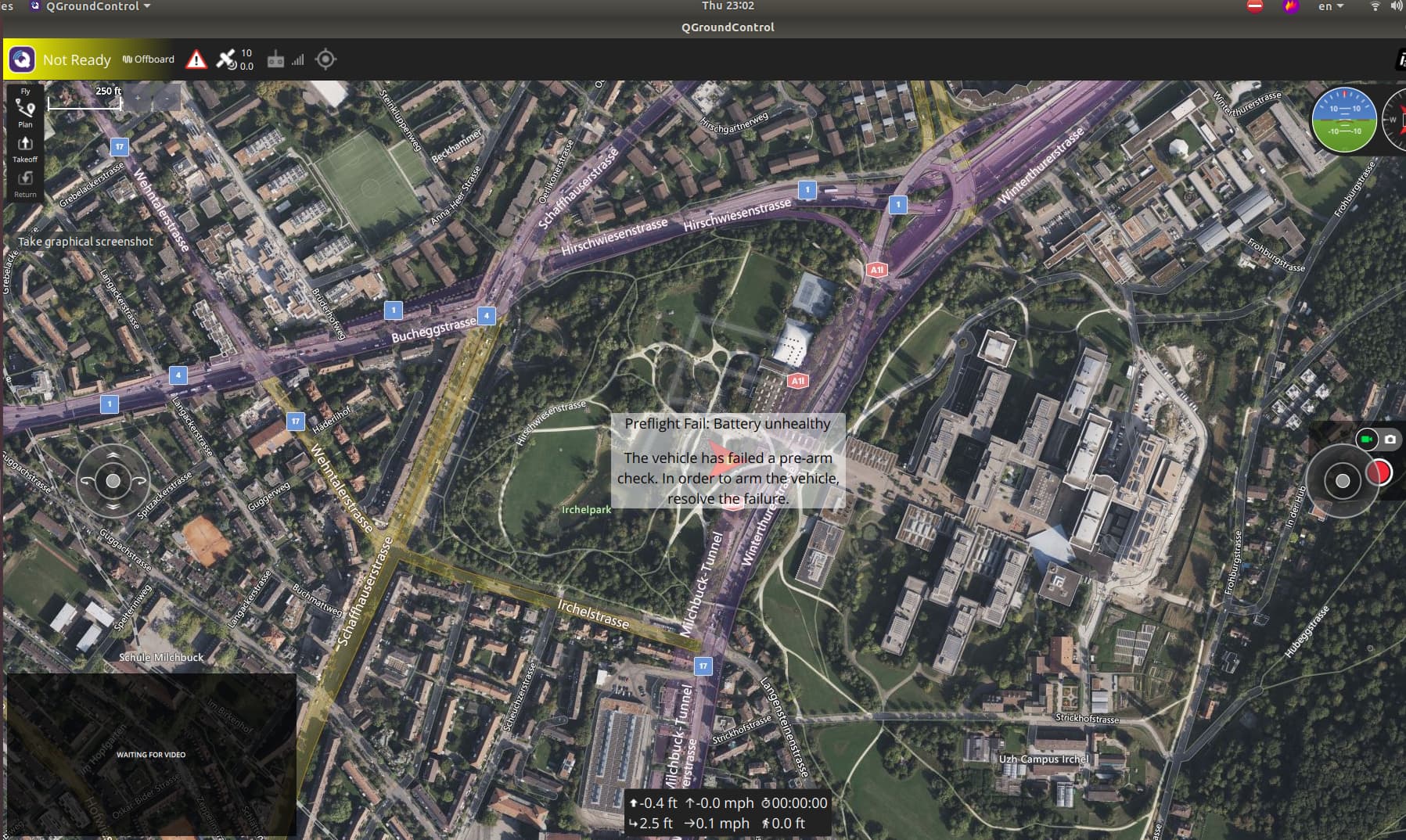
There is an error “Preflight Fail: Battery unhealthy”
Then, drone cannot fly in the simulation envrinoment
The error shows in the terminal of the roslaunch px4 mavros_posix_sitl.launch

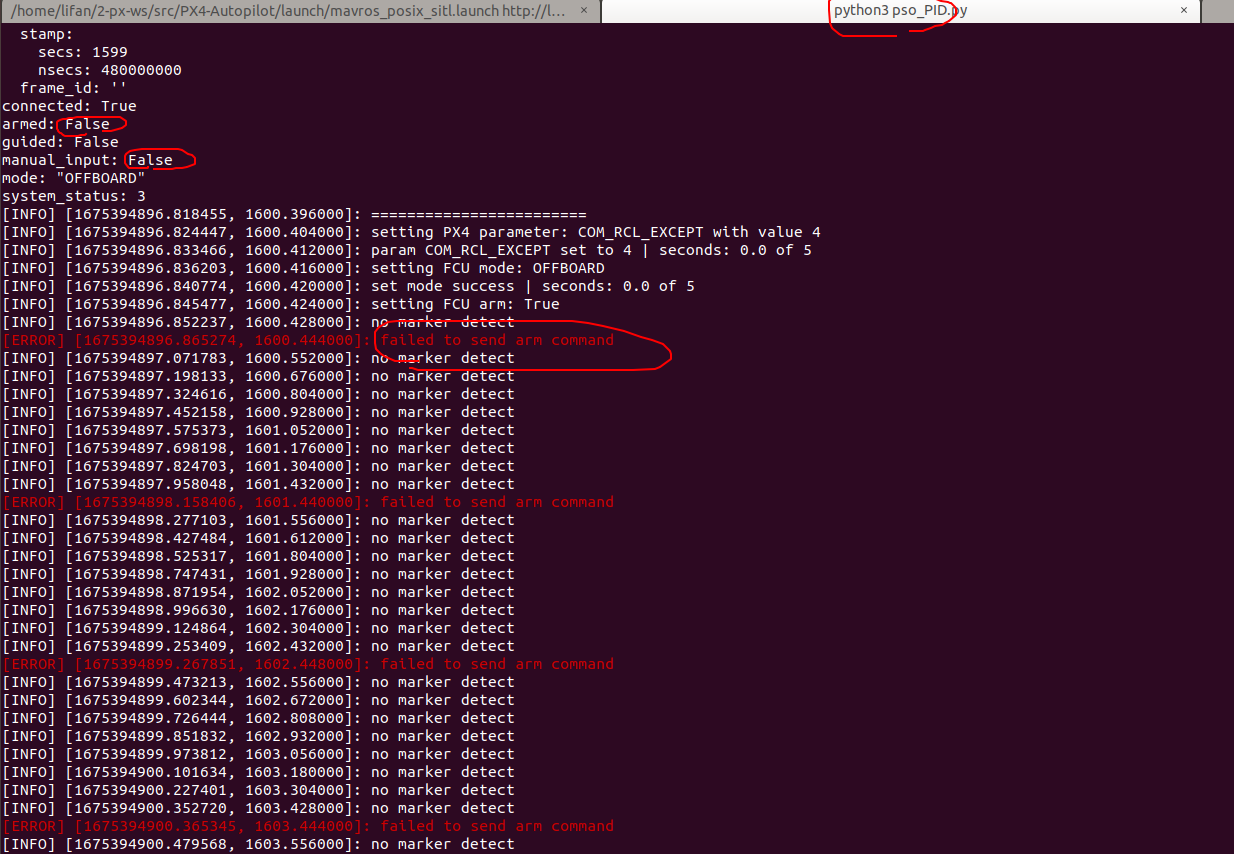
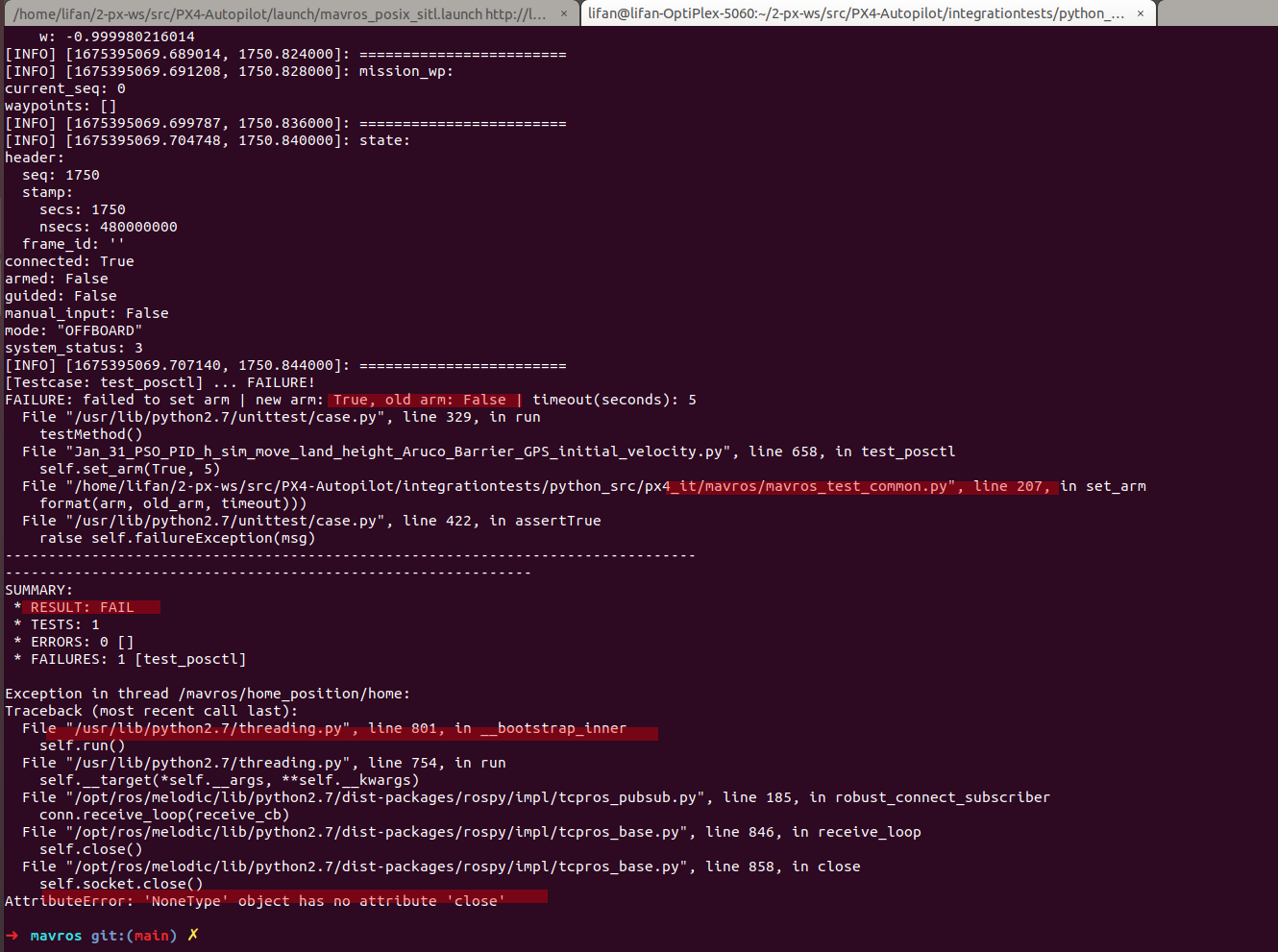
The terminal of python2 mavros_offboard_posctl_test.py shows
“failed to send arm command” and the drone cannot take off
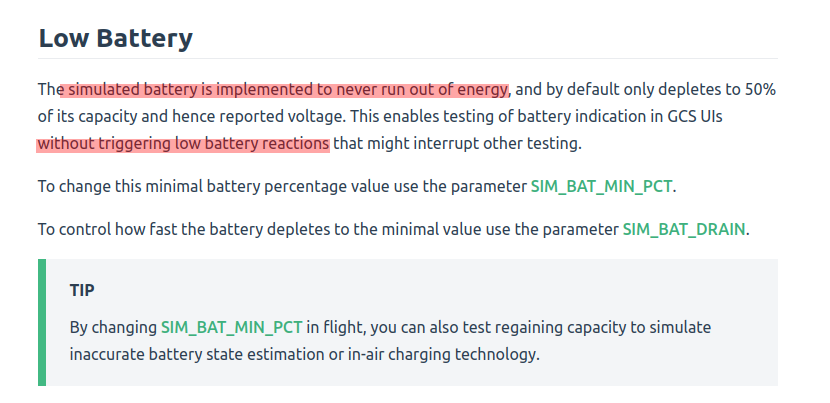
However, the QGroundcontrol show the battery is 100%

If reopen the QGroundcontrol can get the battery error like this
Thus, the issue may be due to roslaunch px4 mavros_posix_sitl.launch
Thanks a lot
Sometimes there is the
“Preflight Fail: position estimate error”
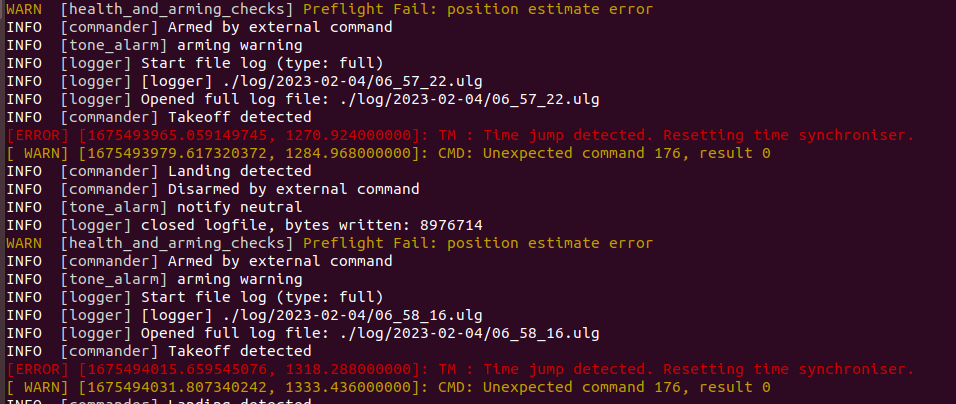
Compass needs calibration - Land now!
Preflight Fail: Attitude failure (roll)