My drone is self-made DJI F550. The offboard computer is Jetson TX1.
The flight board is Pixhawk (PX4_FMU_V5 (V500)) with QGroundControl.
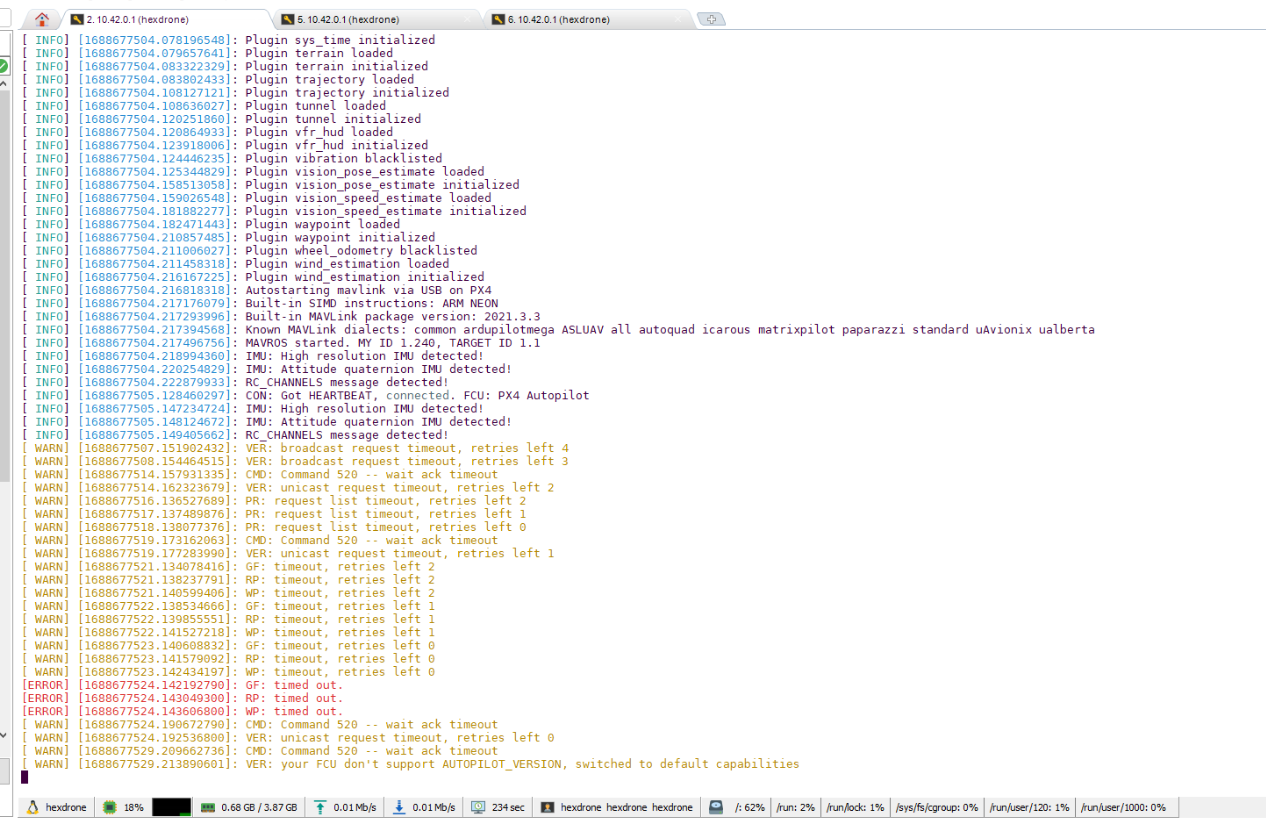
It suddenly cannot take off by offboard control. There is the terminal screenshot of the Jetson TX1., shows the below message when running “roslaunch mavros px4.launch fcu_url:=/dev/ttyUSB0:921600”:
[ WARN] [1688677548.604639760]: VER: broadcast request timeout, retries left 4
[ WARN] [1688677549.600151322]: VER: broadcast request timeout, retries left 3
[ WARN] [1688677555.599940226]: CMD: Command 520 – wait ack timeout
[ WARN] [1688677555.606070903]: VER: unicast request timeout, retries left 2
[ WARN] [1688677557.585891058]: PR: request list timeout, retries left 2
[ WARN] [1688677558.586386423]: PR: request list timeout, retries left 1
[ WARN] [1688677559.587052256]: PR: request list timeout, retries left 0
[ WARN] [1688677560.617184599]: CMD: Command 520 – wait ack timeout
[ WARN] [1688677560.619570484]: VER: unicast request timeout, retries left 1
[ WARN] [1688677562.582352827]: GF: timeout, retries left 2
[ WARN] [1688677562.585419859]: RP: timeout, retries left 2
[ WARN] [1688677562.587453296]: WP: timeout, retries left 2
[ WARN] [1688677563.583687462]: GF: timeout, retries left 1
[ WARN] [1688677563.586262619]: RP: timeout, retries left 1
[ WARN] [1688677563.588825275]: WP: timeout, retries left 1
[ WARN] [1688677564.584618295]: GF: timeout, retries left 0
[ WARN] [1688677564.587194025]: RP: timeout, retries left 0
[ WARN] [1688677564.589615118]: WP: timeout, retries left 0
[ERROR] [1688677565.586319545]: GF: timed out.
[ERROR] [1688677565.588789128]: RP: timed out.
[ERROR] [1688677565.590498087]: WP: timed out.
[ WARN] [1688677565.631234024]: CMD: Command 520 – wait ack timeout
[ WARN] [1688677565.634538972]: VER: unicast request timeout, retries left 0
[ WARN] [1688677570.646284283]: CMD: Command 520 – wait ack timeout
[ WARN] [1688677570.646648606]: VER: your FCU don’t support AUTOPILOT_VERSION, switched to default capabilities
Even it sometimes can take off by offboard control, it will suddenly lose connection like this issue.
There are flight log.
19-09-2023 21:55
19-09-2023 22:04
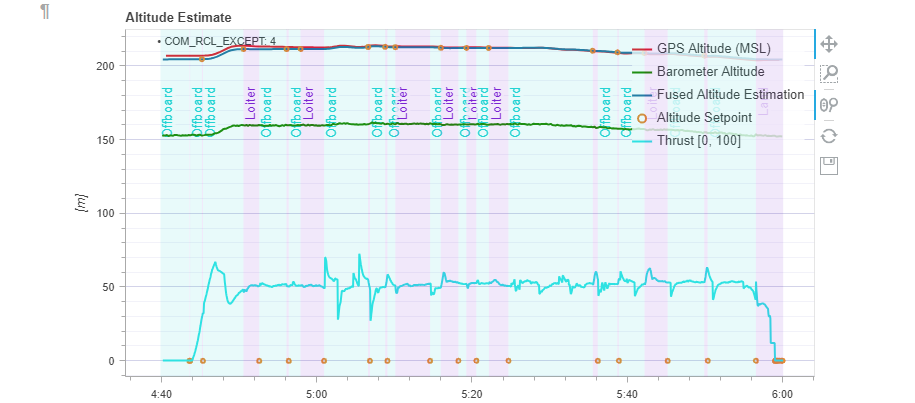
My failsafe mode is hold mode (Loiter). You can see the computer keeps switching between Offboard and Loiter (hold mode) when the Pixhawk loses connection with Jetson Tx1
At the beginning, I thought the loading of the Jetson Tx1 may be too heavy, so I discard rosbag record image.
However, the issue sometimes still happens. Now, even cannot take off.
Thank you very much for your help. ![]()
P.S.
I also check htop in terminal, the CPU and RAM usage rate are just about 60% in Jetson Tx1, so the program loading on the Jetson should be fine.
I still can use RC controller manually control the drone in Position mode, so the Pixhawk and GPS should be fine.
The Jetson Tx1 still can get the /mavros/imu/data, when running “roslaunch mavros px4.launch fcu_url:=/dev/ttyUSB0:921600”, so my hardware wires should be fine.
