I successfully confirmed receiving data in a simulation environment to ROS2 before attempting to receive data through the Ethernet port using Pixhawk 6X.
Afterwards, I attempted to receive data through the Ethernet port to ROS2 using Pixhawk 6X. However, errors occurred during this process.
I followed the PX4 user guide for ethernet network configuration, but I don’t understand exactly what the problem is and why it’s not working.
The steps I followed are as follows:
- PX4 Ethernet Network Setup(PX4 IP 192.168.0.4)
- Ubuntu Ethernet Network Setup(Ubuntu IP 192.168.0.1)
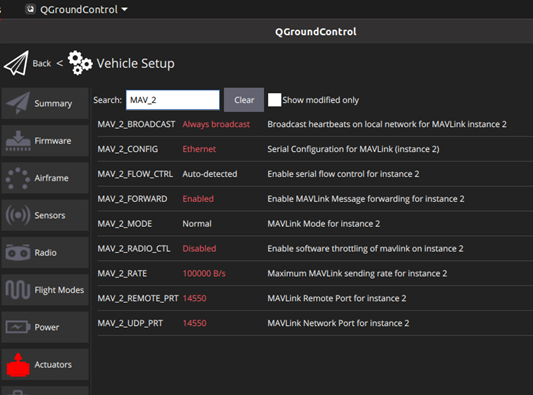
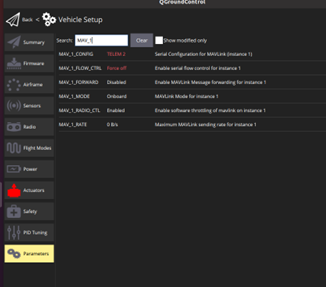
- PX4 MAVLink serial port configuration
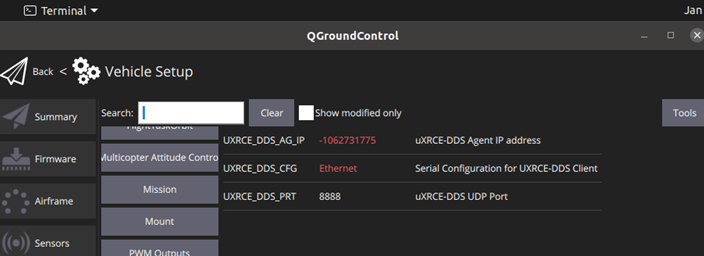
- UXRCE_DDS_CFG : Ethernet
- UXRCE_DDS_PRT : 8888
- UXRCE_DDS_AG_IP : -1062731775(Ubuntu IP 192.168.0.1)

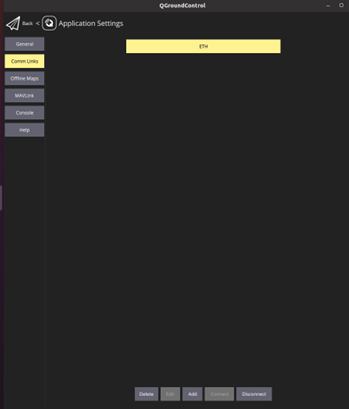
- QGC Setup
- Application Settings > Comm Links > ETH Link configuration settings > Connect
I configured it as mentioned above and executed the client, but nothing happened.
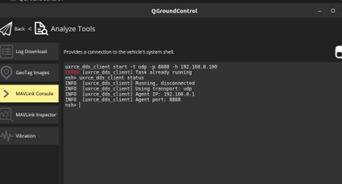
Having configured as mentioned above, I entered the following command in terminal.
- MicroXRCEAgent udp4 -p 8888
- source ~/ws_sensor_combined/install/setup.bash
- ros2 launch px4_ros_com sensor_combined_listener.launch.py
I’m unable to proceed with the part that needs to be done due to the issue of Ethernet connected not working.
If you can help me resolve this situation, it would be a great assistance to me. Please.
If there’s something I’m missing, please let me know.
I am waiting for your response.