Hi @serkan,
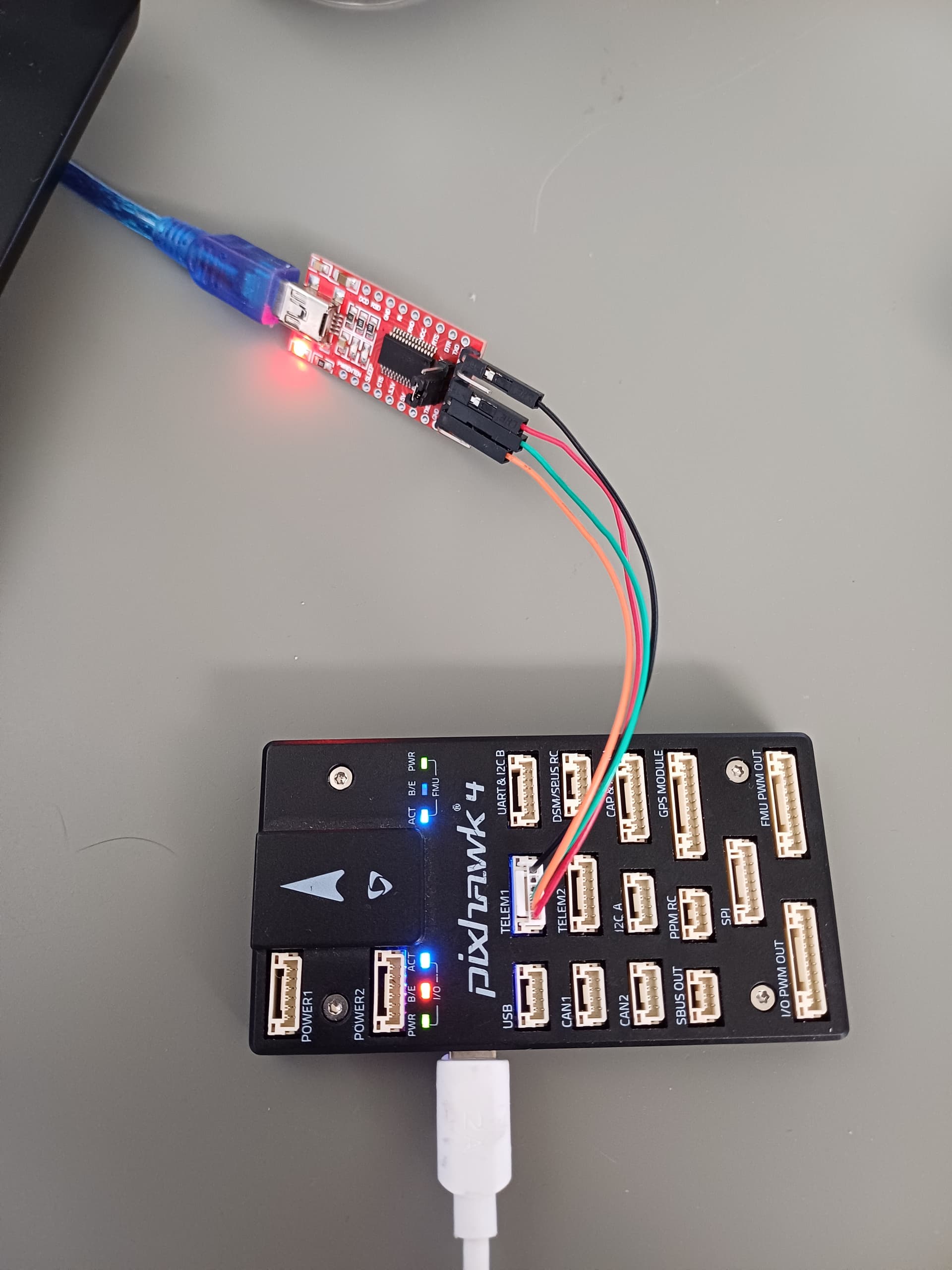
make sure that the TELEM 1 and TELEM 2 are not already used by other services, such as MAVLink.
According to the documentation uXRCE-DDS (PX4-ROS 2/DDS Bridge) | PX4 User Guide, by default the two ports are used to connect to the Ground Station and to an eventual companion computer.
To change this behavior, you have to configure the MAV_0_CONFIG and MAV_1_CONFIG parameters (more details following the previous link).
I closed the QGC application to prevent it from connecting. Then, I connected the FTDI, disconnected and reconnected the power cables of the PX4 board. I supplied power, and the system started working.