Before explaining the error, my environment is as follows.
IP address : 172.20.10.7
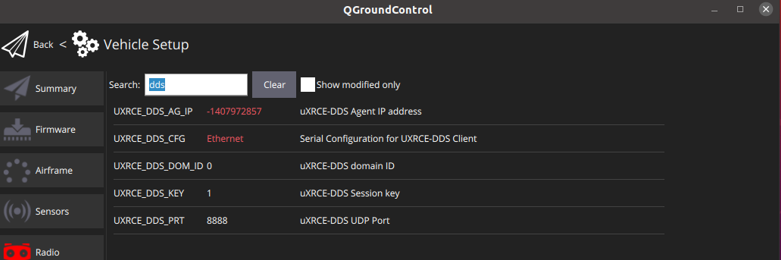
IP address(int32) : -1407972857
The System : Ubuntu20.04 + ROS2
The flight controller : Pixhawk 5X, firmware PX4 v1.14.0
Use uXRCE-DDS middleware for communication
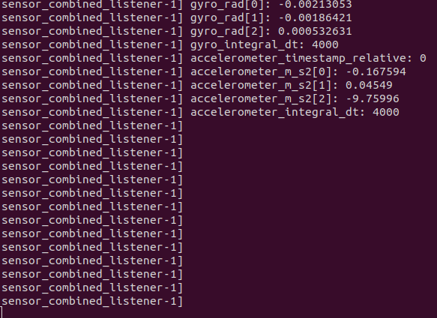
Receive sensor data through Gazebo was successful, but receive sensor data through Pixhawk 5X failed.
Gazebo sensor data
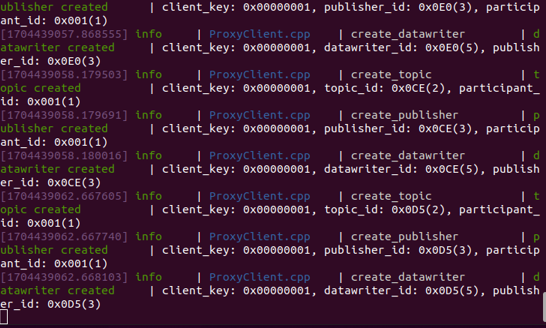
5X sensor data
In my opinion, it seems like it’s not recognizing the port, so I converted the IP address to int32 and configured it in QGC.
Yes, thank you for the response. Currently, I have completed everything except for MAVSDK, following the PX4 Ethernet Setup. However, the client is not connecting. Your guidance on this would be a great help to me.
I know that the two ports should match, but not work on port 8888.
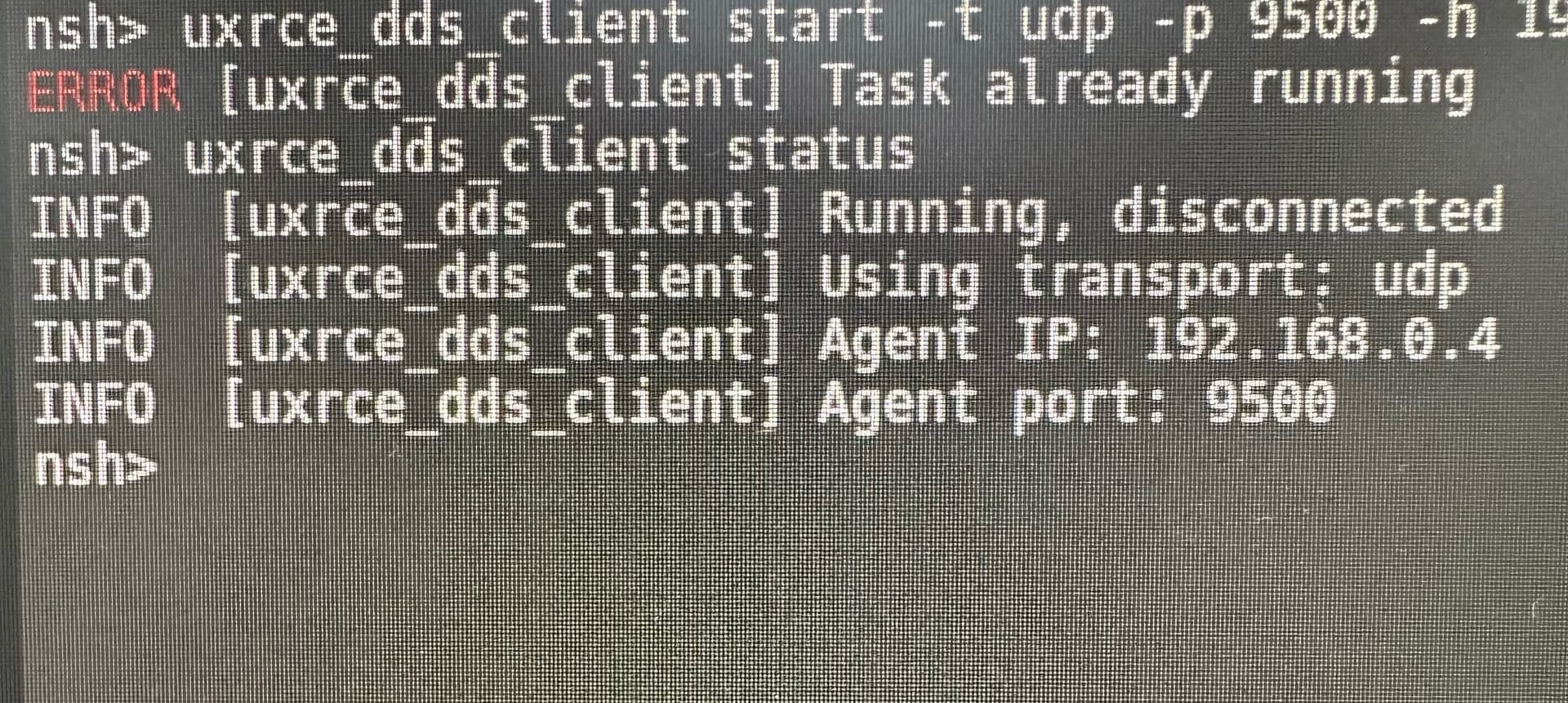
I changed both ports to 9500 and tried to connect.
However, it still not work, so i shared my situation through a message.
I would appreciate it if you check. Thank you.
Hi @YEJUN , apologies for the late reply. I hope you fixed your issue in the meantime.
If you can’t ping the Pixhawk it means you don’t have PX4 properly configured.
Please follow the PX4 ethernet configuration guide and make sure to set it to the appropriate values for your network