Hello, I am not able to connect the uXRCE-DDS agent running on my Jetson NX companion computer connected to the Pixhawk 6X board over ethernet.
I followed thoroughly the PX4 Ethernet setup guide and I am actually able to receive the MAVLink messages over ethernet, so my ethernet connection sees to work fine.
I then followed the ROS2 User Guide to setup both the uXRCE-DDS client and agent. but impossible to make them communicate.
Network setup:
IP of PX4: 10.41.10.2

IP of Jetson NX: 10.41.10.3
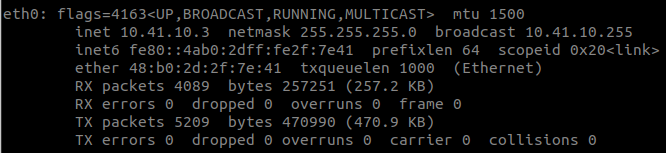
I can ping the PX4 module from the Jetson and I can ping the Jetson from the PX4 module.
PX4 DDS setup:
Note: PX4 firmware version: 1.15.0alpha
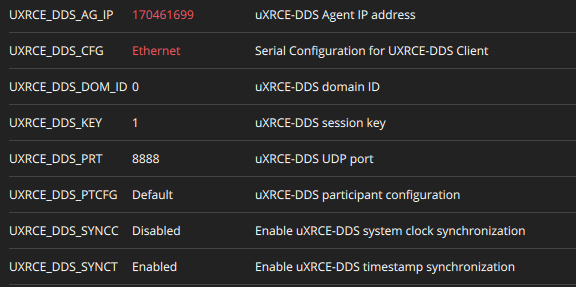
I can see on the MAVLink Console, that the uxrce_dds_client is started with the right parameters:

Note: MAVLink is also communicating over etherent. Shouldn’t be an issue, right?
Jetson NX setup:
- ROS2 humble
- uXRCE-DDS agent version 1.4.2