Hello and Good day
We purchased three PX4 Development Kit - X500 v2, SKU: 30200 from Holybro, the autopilots of which are Pixhawk 6x Rev 8 with Standard Baseboard V1. The first autopilot already had the PX4 v1.14.2 dev firmware and the second autopilot already had the PX4 v1.15.0 alpha firmware, both of which versions are not stable.
TELEM1 port of the autopilots does not work, by changing the MAV_0_CONFIG parameter to TELEM2 and connecting of the telemetry module to TELEM2 port, there is not communication between autopilot and QGroundControl. But by changing the MAV_0_CONFIG parameter to TELEM3 and connecting the telemetry module to TELEM3 port, there is communication.
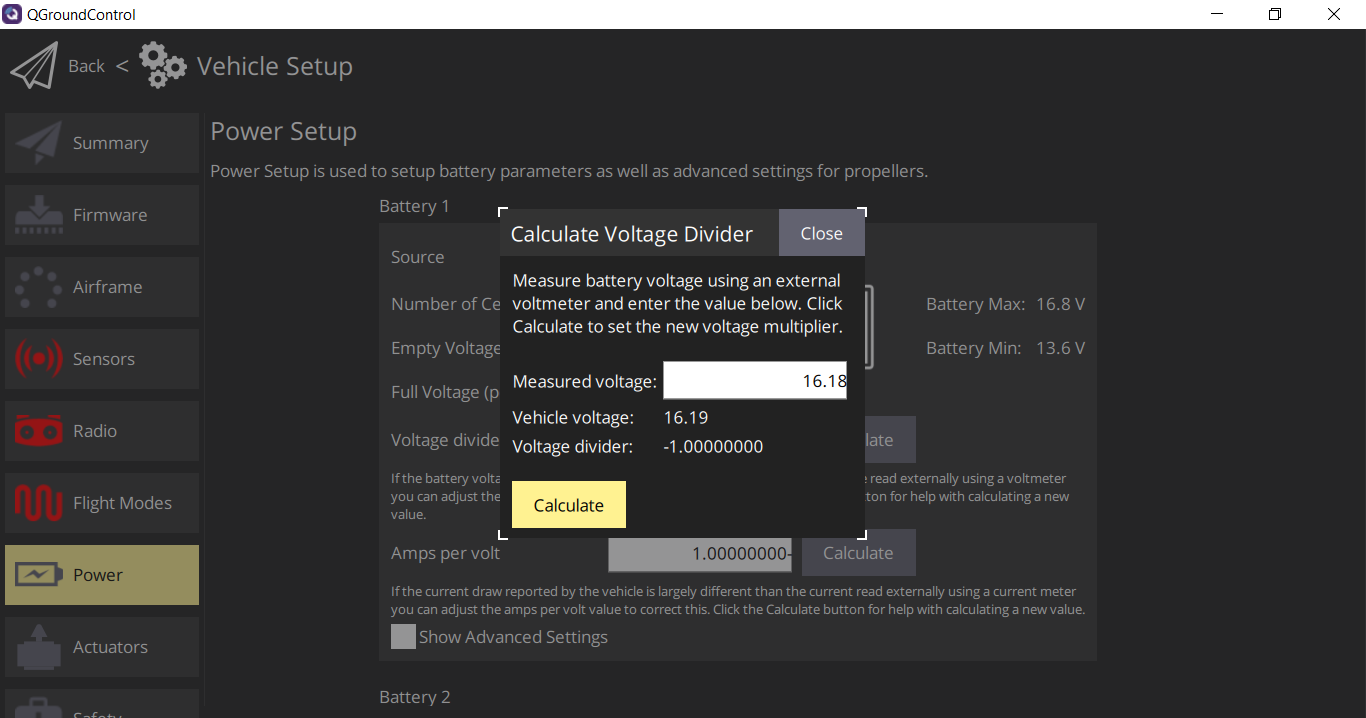
The value of the Bat1_V_DIV parameter (Battery 1 Voltage divider) cannot be changed from -1 by pressing the Calculate button. By reading its description in the PX4 site, I did not understand how much I should set for it.
Also, by resetting the parameter values of the PX4 v1.15.0 alpha firmware to their default values, the corresponding autopilot will have many problems. Fortunately, it will return to its previous state after loading the parameter values of the PX4 v1.14.2 dev firmware to it.
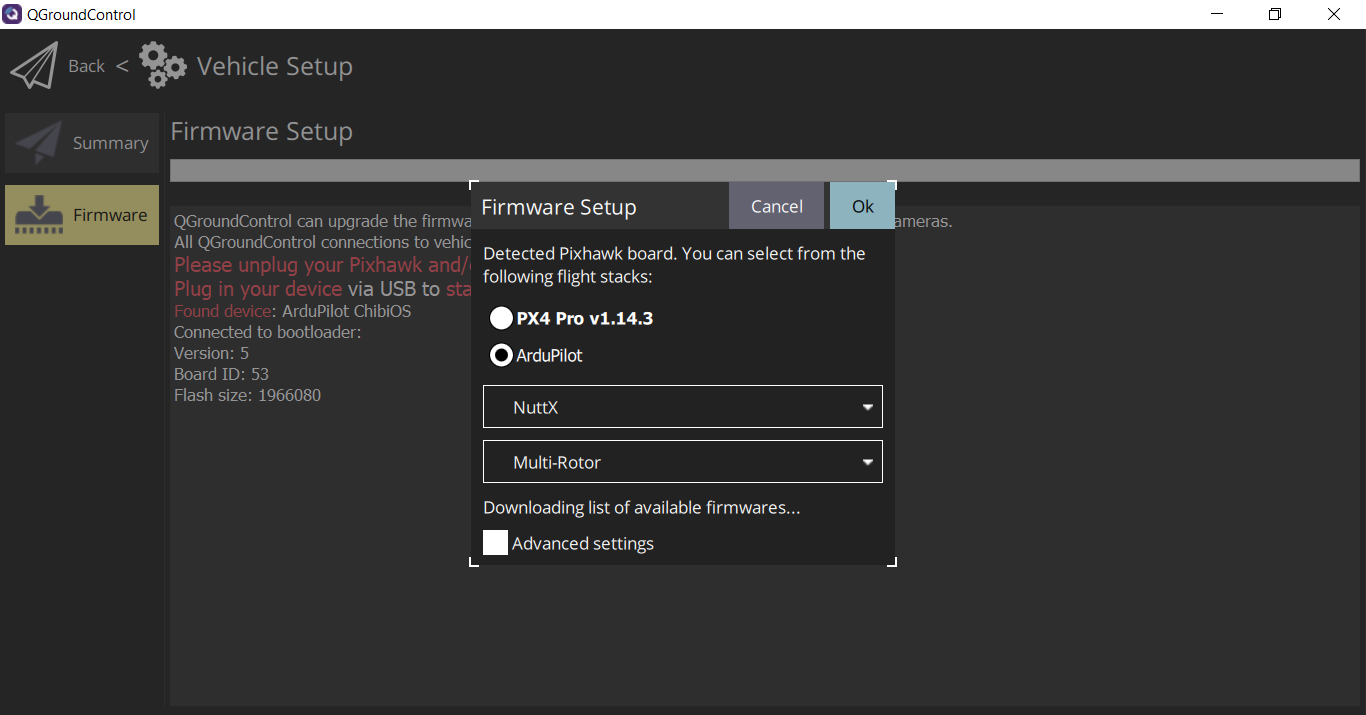
We updated the third autopilot firmware to PX4 v1.14.3 Stable version using QGroundControl. Unfortunately, there are the following problems:
1- TELEM1 port does not work, unlike the other two firmwares, changing the MAV_0_CONFIG parameter to TELEM2 and TELEM3 and connecting the telemetry module to TELEM2 and TELEM3 ports, problem remains.
2- The value of the Bat1_V_DIV parameter (Battery 1 Voltage divider) cannot be changed from -1 by pressing the Calculate button. By reading its description in the PX4 site, I did not understand how much I should set for it.
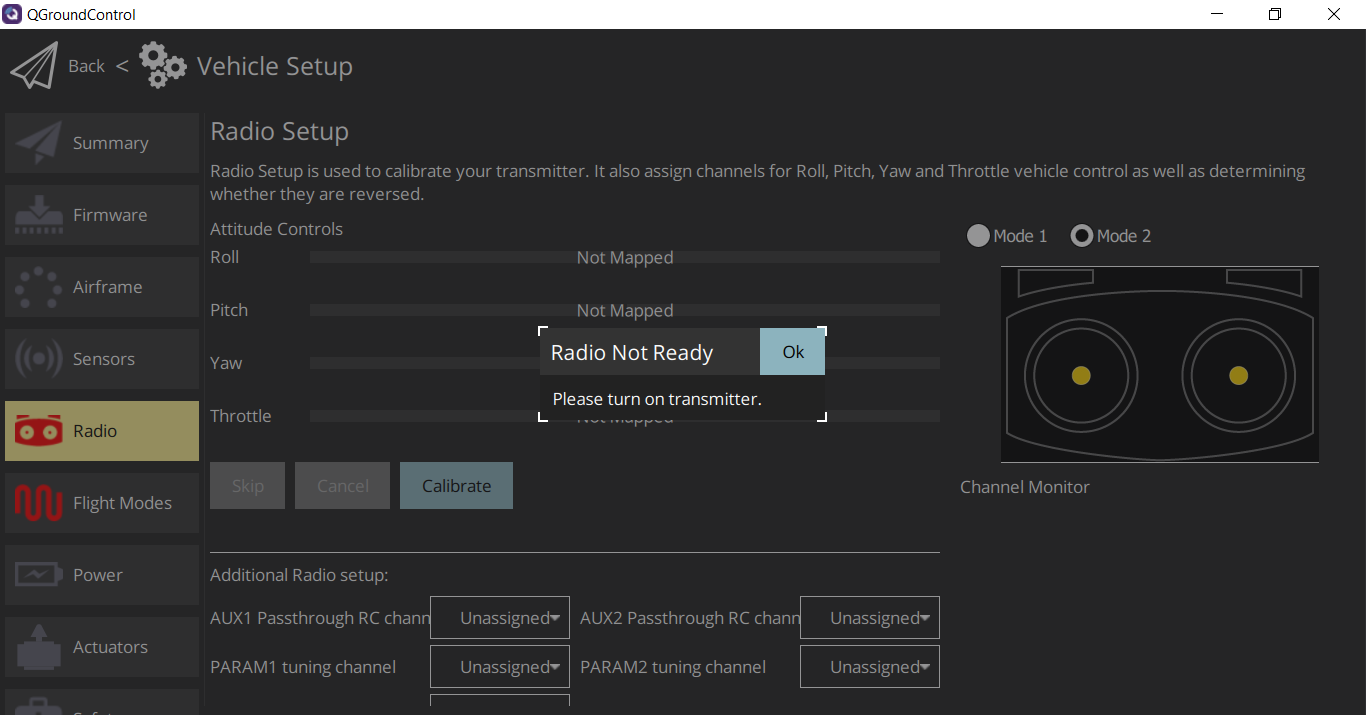
3- The radio control does not work, we tried with two radios from FrSky and RadioLink, but the message “Please turn on transmitter” is always displayed after trying to calibrate the radio controller. After hours of checking the difference of the parameters of the available firmwares, it seems that the problem is with the RC_INPUT_PROTO parameter and the code related to it, because when we select all of its options and restart all the components, the problem remains. This parameter does not exist in the dev and alpha firmwares
4- None of the motors rotate, because the necessary signal is not sent to the speed controllers.
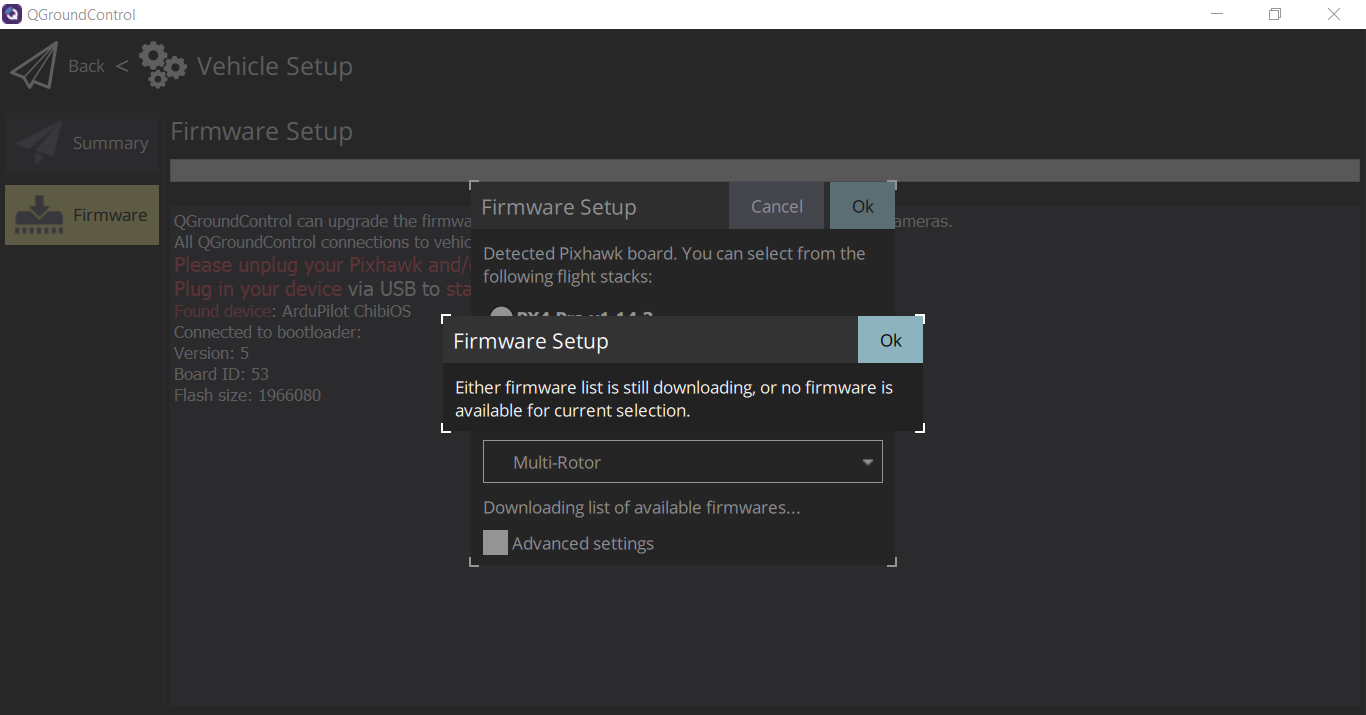
5- Ardupilot firmware cannot be installed on the autopilots.
On Holybro’s website, it is mentioned that this new autopilot (Pixhawk 6x Rev 8) is compatible with PX4 v1.14.3 stable firmware, but a non-stable version was already loaded on them. Currently, the latest stable firmware of the PX4 autopilot is version v1.14.3, and the previous stable version that can be downloaded on GitHub is v1.13.3, unfortunately both of which are not compatible with these autopilots. There are not even alpha and dev firmwares on GitHub or other sites that we can load them on the third autopilot and work with temporarily until these problems are solved in the next stable version.
Please send the download link of PX4 v1.14.2 dev and PX4 v1.15.0 alpha firmwares. Also advise us how to minimize the possibility of the crash using these unstable firmware and very new hardware. In the end, I hope the necessary feedback would be sent to the PX4 and Ardupilot firmware teams so that they can provide stable firmwares compatible with this hardware as soon as possible.
Thanks
When you use PX4 v1.14.3. Can you try to update the bootloader by doing this in the MAVLink shell:
bl_update /etc/extras/px4_fmu-v6x_bootloader.bin
(Or check if I got the path wrong using cd and ls.)
I suspect telem ports not working could be connected with which bootloader you’re using. If you’re using the ArduPilot one, then serial ports don’t work properly (because of a PX4/NuttX omission.)
For more detail see: [Sponsored by CubePilot] stm32h7: Reset USART clock selection by julianoes · Pull Request #23498 · PX4/PX4-Autopilot · GitHub
FYI @Vincentpoont2
Thank you very much.
1- I installed the px4 v1.13.3 firmware
2- I enabled the SYS_BL_UPDATE parameter
3- I entered the text “bl_update /etc/extras/px4_fmu-v6x_bootloader.bin” in the MAVLink Console and the bootloader was updated
4- I installed the px4 v1.14.3 firmware
The problem was solved.