I am using a pixhawk 6x mini. I have set COM_PREARM_MODE=0 (disabled) and CBRK_IO_SAFETY=22027 (I/O safety circuit breaker engaged). BUT when I want to calibrate the ESC keep having “cannot disable the safety switch” and thus cannot move forward.
After reading the px4 docs I do not see any other parameter to set.
Can you tell me, please, if there is something else that can prevent me to arm/calibrate the ESC?
On the Mavlink console, if I enter : listener safety got the following:
safety_switch_available : True
safety_off: True
Looks like that the safety is off but i do not understand the meaning of this safety_switch_available…
I noticed that while the ACT Led is blinking blue, normal, but the B/E led is orange, is it the normal ?
Thank you for your support
@JulianOes thank you for your message. Actually I am using dshot for the ESC (dshot_config= dshot600) and I have SYS_USE_IO = 0 already.
But I got “cannot disable the safety switch”. Now if I set SYS_USE_IO = 1, I do not get this message anymore so I can calibrate the EScs but I cannot spin the motor with the motor sliders… yes one problem at a time so I have to investigate (I have also a problem to retrieve MAVROS msgs on TELEM1 - this 6x board is a hurdle)
This is a side question, but do you know any website where it is possible to purchase a used pixhawk 4 mini? or can you tell me where I can post this question on that site?
The Pixhawk 4 Mini has been discontinued, maybe you will have some luck with some user willing to sell it if they have one laying around, but there is no official marketplace for this sort of stuff.
@JulianOes thank you for the link regarding the uart - I came to the same conclusion and it works fine now
However, I cannot spin the motors yet - I am puzzled here
As I mentioned with SYS_USE_IO = 0 I have the message “cannot disable safety switch”. Beside, the B/E led is orange blinking.
If SYS_USE_IO = 1 I do not have the message anymore and the B/E led is not blinking anymore after reboot.
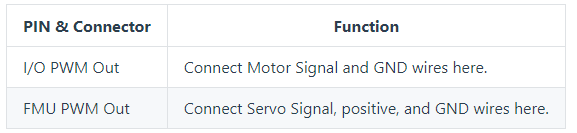
But if I connect the ESC to the FMU PWM OUT - if I follow the instruction (DShot ESCs | PX4 User Guide) the motors do not spin… so far I do not any clue. @Vincentpoont2 thank you for your message.
When I looked at the pin out, only GND and +3.3v are provided for the eight channels. The question is do I have to provide +5v as well?
Thank you very much for your support