Bonsoir, je viens de faire un bateau avec deux moteur.
jai vraiment besoin de votre aide.
je souhaite le commander comme un tank.
manche de gauche commande en meme temps throttle(gaz) et roll(direction).
ma radio taranis x9d en mode 3.
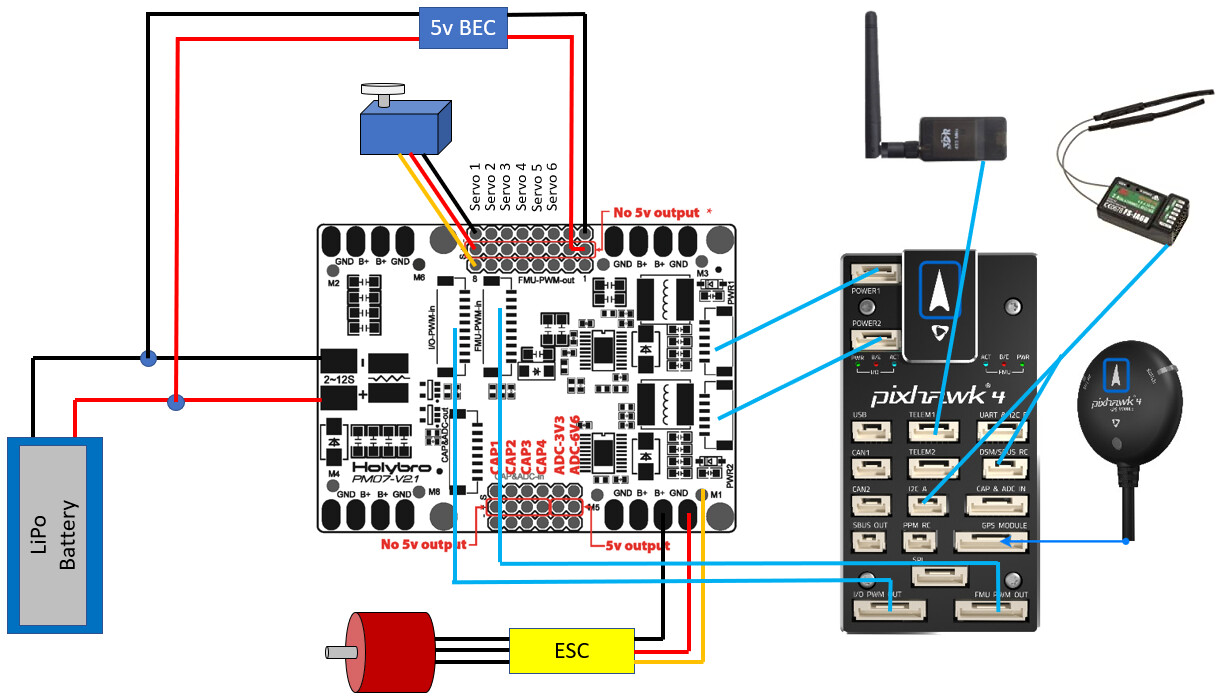
pixhawk 4 (pix4) original
gps holybro pix4
carte pm07
moteur gauche sur M2
moteur droite sur M4
d’après doc pix4
- MAIN2 : direction
- MAIN4 : accélérateur
https://docs.px4.io/master/en/airframes/airframe_reference.html#rover
dans mixage radio.
ch2 roll.
ch3 throuttle.
RCMAp
RCMAP_PITCH 1
RCMAP_ROLL 2
RCMAP_THROTTLE 4
RCMAP_YAW 3
pilot_steer_type sur 1
1er probleme /
quand j’actionne la manche . tout est inversé. en haut jai la direction, en bas throttle, a gauche throttle , a droite direction
2eme probleme,
quand jactionne mode auto, la voiture devient folle? fait des cercle, tourne en rond.
mon fichier log
ACRO_TURN_RATE,180
AHRS_COMP_BETA,0.1
AHRS_CUSTOM_PIT,0
AHRS_CUSTOM_ROLL,0
AHRS_CUSTOM_YAW,0
AHRS_EKF_TYPE,2
AHRS_GPS_GAIN,1
AHRS_GPS_MINSATS,6
AHRS_GPS_USE,1
AHRS_ORIENTATION,0
AHRS_RP_P,0.2
AHRS_TRIM_X,0.02107144
AHRS_TRIM_Y,-0.01210361
AHRS_TRIM_Z,0
AHRS_WIND_MAX,0
AHRS_YAW_P,0.2
ARMING_ACCTHRESH,0.75
ARMING_CHECK,1
ARMING_MIS_ITEMS,0
ARMING_REQUIRE,1
ARMING_RUDDER,2
ARSPD_TYPE,0
ATC_ACCEL_MAX,2
ATC_BAL_D,0.03
ATC_BAL_FF,0
ATC_BAL_FLTD,0
ATC_BAL_FLTE,10
ATC_BAL_FLTT,0
ATC_BAL_I,1.5
ATC_BAL_IMAX,1
ATC_BAL_P,1.8
ATC_BAL_SPD_FF,1
ATC_BRAKE,1
ATC_DECEL_MAX,0
ATC_SAIL_D,0
ATC_SAIL_FF,0
ATC_SAIL_FLTD,0
ATC_SAIL_FLTE,10
ATC_SAIL_FLTT,0
ATC_SAIL_I,0.1
ATC_SAIL_IMAX,1
ATC_SAIL_P,1
ATC_SPEED_D,0
ATC_SPEED_FF,0
ATC_SPEED_FLTD,0
ATC_SPEED_FLTE,10
ATC_SPEED_FLTT,0
ATC_SPEED_I,0.2
ATC_SPEED_IMAX,1
ATC_SPEED_P,0.2
ATC_STOP_SPEED,0.1
ATC_STR_ACC_MAX,180
ATC_STR_ANG_P,2.5
ATC_STR_RAT_D,0
ATC_STR_RAT_FF,0.2
ATC_STR_RAT_FLTD,0
ATC_STR_RAT_FLTE,10
ATC_STR_RAT_FLTT,0
ATC_STR_RAT_I,0.2
ATC_STR_RAT_IMAX,1
ATC_STR_RAT_MAX,360
ATC_STR_RAT_P,0.2
AUTO_KICKSTART,0
AUTO_TRIGGER_PIN,-1
AVOID_ANGLE_MAX,1000
AVOID_BEHAVE,1
AVOID_DIST_MAX,5
AVOID_ENABLE,3
AVOID_MARGIN,2
BAL_PITCH_MAX,2
BAL_PITCH_TRIM,0
BATT_MONITOR,0
BATT2_MONITOR,0
BATT3_MONITOR,0
BATT4_MONITOR,0
BATT5_MONITOR,0
BATT6_MONITOR,0
BATT7_MONITOR,0
BATT8_MONITOR,0
BATT9_MONITOR,0
BCN_ALT,0
BCN_LATITUDE,0
BCN_LONGITUDE,0
BCN_ORIENT_YAW,0
BCN_TYPE,0
BRD_BOOT_DELAY,0
BRD_IO_ENABLE,1
BRD_OPTIONS,1
BRD_PWM_COUNT,8
BRD_RTC_TYPES,1
BRD_RTC_TZ_MIN,0
BRD_SAFETY_MASK,0
BRD_SAFETYENABLE,1
BRD_SAFETYOPTION,7
BRD_SBUS_OUT,0
BRD_SD_SLOWDOWN,0
BRD_SER1_RTSCTS,2
BRD_SER2_RTSCTS,2
BRD_SERIAL_NUM,0
BRD_TYPE,24
BRD_VBUS_MIN,4.3
BRD_VSERVO_MIN,0
BTN_ENABLE,0
CAM_AUTO_ONLY,0
CAM_DURATION,10
CAM_FEEDBACK_PIN,-1
CAM_FEEDBACK_POL,1
CAM_MAX_ROLL,0
CAM_MIN_INTERVAL,0
CAM_RELAY_ON,1
CAM_SERVO_OFF,1100
CAM_SERVO_ON,1300
CAM_TRIGG_DIST,0
CAM_TRIGG_TYPE,0
CAM_TYPE,0
CAN_D1_PROTOCOL,1
CAN_D2_PROTOCOL,1
CAN_P1_DRIVER,0
CAN_P2_DRIVER,0
CAN_SLCAN_CPORT,0
CAN_SLCAN_SERNUM,-1
CAN_SLCAN_TIMOUT,0
COMPASS_AUTO_ROT,2
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_DEC,0.01219871
COMPASS_DEV_ID,658953
COMPASS_DEV_ID2,658945
COMPASS_DEV_ID3,0
COMPASS_DIA_X,0.9991175
COMPASS_DIA_Y,1.014566
COMPASS_DIA_Z,1.059517
COMPASS_DIA2_X,1.020576
COMPASS_DIA2_Y,0.9797195
COMPASS_DIA2_Z,1.026345
COMPASS_DIA3_X,0
COMPASS_DIA3_Y,0
COMPASS_DIA3_Z,0
COMPASS_ENABLE,1
COMPASS_EXP_DID,-1
COMPASS_EXP_DID2,-1
COMPASS_EXP_DID3,-1
COMPASS_EXTERN2,0
COMPASS_EXTERN3,0
COMPASS_EXTERNAL,1
COMPASS_FLTR_RNG,0
COMPASS_LEARN,0
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_MOTCT,0
COMPASS_ODI_X,0.001618669
COMPASS_ODI_Y,-0.02338808
COMPASS_ODI_Z,0.06448549
COMPASS_ODI2_X,-0.004242353
COMPASS_ODI2_Y,-0.05557165
COMPASS_ODI2_Z,-0.1067501
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_OFFS_MAX,1800
COMPASS_OFS_X,33.16496
COMPASS_OFS_Y,30.1399
COMPASS_OFS_Z,112.3628
COMPASS_OFS2_X,22.78148
COMPASS_OFS2_Y,45.82388
COMPASS_OFS2_Z,1.679829
COMPASS_OFS3_X,0
COMPASS_OFS3_Y,0
COMPASS_OFS3_Z,0
COMPASS_ORIENT,0
COMPASS_ORIENT2,0
COMPASS_ORIENT3,0
COMPASS_PMOT_EN,0
COMPASS_PRIMARY,0
COMPASS_TYPEMASK,0
COMPASS_USE,1
COMPASS_USE2,1
COMPASS_USE3,0
CRASH_ANGLE,0
CRUISE_SPEED,0.006350594
CRUISE_THROTTLE,11
EK2_ABIAS_P_NSE,0.005
EK2_ACC_P_NSE,0.6
EK2_ALT_M_NSE,3
EK2_ALT_SOURCE,0
EK2_BCN_DELAY,50
EK2_BCN_I_GTE,500
EK2_BCN_M_NSE,1
EK2_CHECK_SCALE,100
EK2_EAS_I_GATE,400
EK2_EAS_M_NSE,1.4
EK2_ENABLE,1
EK2_EXTNAV_DELAY,10
EK2_FLOW_DELAY,10
EK2_FLOW_I_GATE,300
EK2_FLOW_M_NSE,0.25
EK2_FLOW_USE,1
EK2_GBIAS_P_NSE,0.0001
EK2_GLITCH_RAD,25
EK2_GPS_CHECK,31
EK2_GPS_TYPE,0
EK2_GSCL_P_NSE,0.0005
EK2_GYRO_P_NSE,0.03
EK2_HGT_DELAY,60
EK2_HGT_I_GATE,500
EK2_HRT_FILT,2
EK2_IMU_MASK,3
EK2_LOG_MASK,1
EK2_MAG_CAL,2
EK2_MAG_EF_LIM,50
EK2_MAG_I_GATE,300
EK2_MAG_M_NSE,0.05
EK2_MAG_MASK,0
EK2_MAGB_P_NSE,0.0001
EK2_MAGE_P_NSE,0.001
EK2_MAX_FLOW,2.5
EK2_NOAID_M_NSE,10
EK2_OGN_HGT_MASK,0
EK2_POS_I_GATE,500
EK2_POSNE_M_NSE,1
EK2_RNG_I_GATE,500
EK2_RNG_M_NSE,0.5
EK2_RNG_USE_HGT,-1
EK2_RNG_USE_SPD,2
EK2_TAU_OUTPUT,25
EK2_TERR_GRAD,0.1
EK2_VEL_I_GATE,500
EK2_VELD_M_NSE,0.7
EK2_VELNE_M_NSE,0.5
EK2_WIND_P_NSE,0.1
EK2_WIND_PSCALE,0.5
EK2_YAW_I_GATE,300
EK2_YAW_M_NSE,0.5
EK3_ENABLE,0
FENCE_ACTION,1
FENCE_ENABLE,0
FENCE_MARGIN,2
FENCE_RADIUS,300
FENCE_TOTAL,0
FENCE_TYPE,6
FOLL_ENABLE,0
FORMAT_VERSION,16
FRAME_CLASS,1
FRAME_TYPE,0
FS_ACTION,2
FS_CRASH_CHECK,0
FS_EKF_ACTION,1
FS_EKF_THRESH,0.8
FS_GCS_ENABLE,0
FS_OPTIONS,0
FS_THR_ENABLE,1
FS_THR_VALUE,910
FS_TIMEOUT,1.5
GCS_PID_MASK,0
GND_ABS_PRESS,100666.6
GND_ABS_PRESS2,0
GND_ABS_PRESS3,0
GND_ALT_OFFSET,0
GND_EXT_BUS,-1
GND_FLTR_RNG,0
GND_PRIMARY,0
GND_PROBE_EXT,0
GND_TEMP,0
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_BLEND_MASK,5
GPS_BLEND_TC,10
GPS_DELAY_MS,0
GPS_DELAY_MS2,0
GPS_GNSS_MODE,0
GPS_GNSS_MODE2,0
GPS_INJECT_TO,127
GPS_MIN_DGPS,100
GPS_MIN_ELEV,-100
GPS_NAVFILTER,8
GPS_POS1_X,0
GPS_POS1_Y,0
GPS_POS1_Z,0
GPS_POS2_X,0
GPS_POS2_Y,0
GPS_POS2_Z,0
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_RAW_DATA,0
GPS_SAVE_CFG,2
GPS_SBAS_MODE,2
GPS_SBP_LOGMASK,-256
GPS_TYPE,1
GPS_TYPE2,0
GRIP_ENABLE,0
INITIAL_MODE,0
INS_ACC_BODYFIX,2
INS_ACC_ID,2621706
INS_ACC2_ID,2688010
INS_ACC2OFFS_X,0.4871555
INS_ACC2OFFS_Y,-0.1861272
INS_ACC2OFFS_Z,0.04268315
INS_ACC2SCAL_X,0.9846563
INS_ACC2SCAL_Y,0.9811945
INS_ACC2SCAL_Z,0.9870194
INS_ACC3_ID,0
INS_ACC3OFFS_X,0
INS_ACC3OFFS_Y,0
INS_ACC3OFFS_Z,0
INS_ACC3SCAL_X,0
INS_ACC3SCAL_Y,0
INS_ACC3SCAL_Z,0
INS_ACCEL_FILTER,10
INS_ACCOFFS_X,-0.04209312
INS_ACCOFFS_Y,0.1227003
INS_ACCOFFS_Z,0.003822332
INS_ACCSCAL_X,0.9976523
INS_ACCSCAL_Y,0.9983088
INS_ACCSCAL_Z,0.9832263
INS_ENABLE_MASK,127
INS_FAST_SAMPLE,1
INS_GYR_CAL,1
INS_GYR_ID,2621706
INS_GYR2_ID,2687754
INS_GYR2OFFS_X,0.0002578203
INS_GYR2OFFS_Y,-0.0007164548
INS_GYR2OFFS_Z,-0.002620417
INS_GYR3_ID,0
INS_GYR3OFFS_X,0
INS_GYR3OFFS_Y,0
INS_GYR3OFFS_Z,0
INS_GYRO_FILTER,4
INS_GYROFFS_X,0.02461069
INS_GYROFFS_Y,-0.002922379
INS_GYROFFS_Z,-0.002442456
INS_HNTCH_ENABLE,0
INS_LOG_BAT_CNT,1024
INS_LOG_BAT_LGCT,32
INS_LOG_BAT_LGIN,20
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
INS_NOTCH_ENABLE,0
INS_POS1_X,0
INS_POS1_Y,0
INS_POS1_Z,0
INS_POS2_X,0
INS_POS2_Y,0
INS_POS2_Z,0
INS_POS3_X,0
INS_POS3_Y,0
INS_POS3_Z,0
INS_STILL_THRESH,0.1
INS_TRIM_OPTION,1
INS_USE,1
INS_USE2,1
INS_USE3,1
LOG_BACKEND_TYPE,1
LOG_BITMASK,65535
LOG_DISARMED,0
LOG_FILE_BUFSIZE,50
LOG_FILE_DSRMROT,0
LOG_FILE_TIMEOUT,5
LOG_MAV_BUFSIZE,8
LOG_REPLAY,0
LOIT_RADIUS,2
LOIT_SPEED_GAIN,0.5
LOIT_TYPE,0
MIS_DONE_BEHAVE,0
MIS_OPTIONS,0
MIS_RESTART,0
MIS_TOTAL,3
MNT_ANGMAX_PAN,4500
MNT_ANGMAX_ROL,4500
MNT_ANGMAX_TIL,4500
MNT_ANGMIN_PAN,-4500
MNT_ANGMIN_ROL,-4500
MNT_ANGMIN_TIL,-4500
MNT_DEFLT_MODE,3
MNT_JSTICK_SPD,0
MNT_LEAD_PTCH,0
MNT_LEAD_RLL,0
MNT_NEUTRAL_X,0
MNT_NEUTRAL_Y,0
MNT_NEUTRAL_Z,0
MNT_RC_IN_PAN,0
MNT_RC_IN_ROLL,0
MNT_RC_IN_TILT,0
MNT_RETRACT_X,0
MNT_RETRACT_Y,0
MNT_RETRACT_Z,0
MNT_STAB_PAN,0
MNT_STAB_ROLL,0
MNT_STAB_TILT,0
MNT_TYPE,0
MODE_CH,5
MODE1,0
MODE2,0
MODE3,0
MODE4,10
MODE5,0
MODE6,11
MOT_PWM_FREQ,16
MOT_PWM_TYPE,0
MOT_SAFE_DISARM,0
MOT_SLEWRATE,100
MOT_SPD_SCA_BASE,1
MOT_THR_MAX,100
MOT_THR_MIN,0
MOT_THST_EXPO,0
MOT_VEC_THR_BASE,0
NAVL1_DAMPING,0.75
NAVL1_PERIOD,8
NAVL1_XTRACK_I,0.02
NTF_BUZZ_ENABLE,1
NTF_BUZZ_ON_LVL,1
NTF_BUZZ_PIN,0
NTF_BUZZ_VOLUME,100
NTF_DISPLAY_TYPE,0
NTF_LED_BRIGHT,3
NTF_LED_OVERRIDE,0
NTF_LED_TYPES,199
NTF_OREO_THEME,0
OA_TYPE,0
PILOT_STEER_TYPE,2
PRX_IGN_ANG1,0
PRX_IGN_ANG2,0
PRX_IGN_ANG3,0
PRX_IGN_ANG4,0
PRX_IGN_ANG5,0
PRX_IGN_ANG6,0
PRX_IGN_WID1,0
PRX_IGN_WID2,0
PRX_IGN_WID3,0
PRX_IGN_WID4,0
PRX_IGN_WID5,0
PRX_IGN_WID6,0
PRX_ORIENT,0
PRX_TYPE,0
PRX_YAW_CORR,0
RALLY_INCL_HOME,1
RALLY_LIMIT_KM,0.5
RALLY_TOTAL,0
RC_OPTIONS,0
RC_OVERRIDE_TIME,3
RC1_DZ,0
RC1_MAX,2006
RC1_MIN,982
RC1_OPTION,0
RC1_REVERSED,1
RC1_TRIM,2006
RC10_DZ,0
RC10_MAX,2006
RC10_MIN,982
RC10_OPTION,0
RC10_REVERSED,0
RC10_TRIM,2006
RC11_DZ,0
RC11_MAX,2006
RC11_MIN,982
RC11_OPTION,0
RC11_REVERSED,0
RC11_TRIM,982
RC12_DZ,0
RC12_MAX,2006
RC12_MIN,982
RC12_OPTION,0
RC12_REVERSED,0
RC12_TRIM,2006
RC13_DZ,0
RC13_MAX,1900
RC13_MIN,1100
RC13_OPTION,0
RC13_REVERSED,0
RC13_TRIM,1500
RC14_DZ,0
RC14_MAX,1900
RC14_MIN,1100
RC14_OPTION,0
RC14_REVERSED,0
RC14_TRIM,1500
RC15_DZ,0
RC15_MAX,1900
RC15_MIN,1100
RC15_OPTION,0
RC15_REVERSED,0
RC15_TRIM,1500
RC16_DZ,0
RC16_MAX,1900
RC16_MIN,1100
RC16_OPTION,0
RC16_REVERSED,0
RC16_TRIM,1500
RC2_DZ,30
RC2_MAX,2006
RC2_MIN,982
RC2_OPTION,0
RC2_REVERSED,0
RC2_TRIM,1509
RC3_DZ,30
RC3_MAX,1900
RC3_MIN,1100
RC3_OPTION,0
RC3_REVERSED,0
RC3_TRIM,1500
RC4_DZ,30
RC4_MAX,2006
RC4_MIN,982
RC4_OPTION,0
RC4_REVERSED,0
RC4_TRIM,1508
RC5_DZ,0
RC5_MAX,2006
RC5_MIN,982
RC5_OPTION,0
RC5_REVERSED,0
RC5_TRIM,982
RC6_DZ,0
RC6_MAX,1900
RC6_MIN,1100
RC6_OPTION,0
RC6_REVERSED,0
RC6_TRIM,1500
RC7_DZ,0
RC7_MAX,2006
RC7_MIN,982
RC7_OPTION,41
RC7_REVERSED,0
RC7_TRIM,982
RC8_DZ,0
RC8_MAX,1900
RC8_MIN,1100
RC8_OPTION,0
RC8_REVERSED,0
RC8_TRIM,1500
RC9_DZ,0
RC9_MAX,2006
RC9_MIN,982
RC9_OPTION,0
RC9_REVERSED,0
RC9_TRIM,2006
RCMAP_PITCH,1
RCMAP_ROLL,2
RCMAP_THROTTLE,4
RCMAP_YAW,3
RELAY_DEFAULT,0
RELAY_PIN,-1
RELAY_PIN2,-1
RELAY_PIN3,-1
RELAY_PIN4,-1
RELAY_PIN5,-1
RELAY_PIN6,-1
RNGFND1_ADDR,0
RNGFND1_FUNCTION,0
RNGFND1_GNDCLEAR,10
RNGFND1_MAX_CM,700
RNGFND1_MIN_CM,20
RNGFND1_OFFSET,0
RNGFND1_ORIENT,0
RNGFND1_PIN,-1
RNGFND1_POS_X,0
RNGFND1_POS_Y,0
RNGFND1_POS_Z,0
RNGFND1_PWRRNG,0
RNGFND1_RMETRIC,1
RNGFND1_SCALING,3
RNGFND1_STOP_PIN,-1
RNGFND1_TYPE,0
RNGFND2_ADDR,0
RNGFND2_FUNCTION,0
RNGFND2_GNDCLEAR,10
RNGFND2_MAX_CM,700
RNGFND2_MIN_CM,20
RNGFND2_OFFSET,0
RNGFND2_ORIENT,0
RNGFND2_PIN,-1
RNGFND2_POS_X,0
RNGFND2_POS_Y,0
RNGFND2_POS_Z,0
RNGFND2_PWRRNG,0
RNGFND2_RMETRIC,1
RNGFND2_SCALING,3
RNGFND2_STOP_PIN,-1
RNGFND2_TYPE,0
RNGFND3_ADDR,0
RNGFND3_FUNCTION,0
RNGFND3_GNDCLEAR,10
RNGFND3_MAX_CM,700
RNGFND3_MIN_CM,20
RNGFND3_OFFSET,0
RNGFND3_ORIENT,0
RNGFND3_PIN,-1
RNGFND3_POS_X,0
RNGFND3_POS_Y,0
RNGFND3_POS_Z,0
RNGFND3_PWRRNG,0
RNGFND3_RMETRIC,1
RNGFND3_SCALING,3
RNGFND3_STOP_PIN,-1
RNGFND3_TYPE,0
RNGFND4_ADDR,0
RNGFND4_FUNCTION,0
RNGFND4_GNDCLEAR,10
RNGFND4_MAX_CM,700
RNGFND4_MIN_CM,20
RNGFND4_OFFSET,0
RNGFND4_ORIENT,0
RNGFND4_PIN,-1
RNGFND4_POS_X,0
RNGFND4_POS_Y,0
RNGFND4_POS_Z,0
RNGFND4_PWRRNG,0
RNGFND4_RMETRIC,1
RNGFND4_SCALING,3
RNGFND4_STOP_PIN,-1
RNGFND4_TYPE,0
RNGFND5_ADDR,0
RNGFND5_FUNCTION,0
RNGFND5_GNDCLEAR,10
RNGFND5_MAX_CM,700
RNGFND5_MIN_CM,20
RNGFND5_OFFSET,0
RNGFND5_ORIENT,0
RNGFND5_PIN,-1
RNGFND5_POS_X,0
RNGFND5_POS_Y,0
RNGFND5_POS_Z,0
RNGFND5_PWRRNG,0
RNGFND5_RMETRIC,1
RNGFND5_SCALING,3
RNGFND5_STOP_PIN,-1
RNGFND5_TYPE,0
RNGFND6_ADDR,0
RNGFND6_FUNCTION,0
RNGFND6_GNDCLEAR,10
RNGFND6_MAX_CM,700
RNGFND6_MIN_CM,20
RNGFND6_OFFSET,0
RNGFND6_ORIENT,0
RNGFND6_PIN,-1
RNGFND6_POS_X,0
RNGFND6_POS_Y,0
RNGFND6_POS_Z,0
RNGFND6_PWRRNG,0
RNGFND6_RMETRIC,1
RNGFND6_SCALING,3
RNGFND6_STOP_PIN,-1
RNGFND6_TYPE,0
RNGFND7_ADDR,0
RNGFND7_FUNCTION,0
RNGFND7_GNDCLEAR,10
RNGFND7_MAX_CM,700
RNGFND7_MIN_CM,20
RNGFND7_OFFSET,0
RNGFND7_ORIENT,0
RNGFND7_PIN,-1
RNGFND7_POS_X,0
RNGFND7_POS_Y,0
RNGFND7_POS_Z,0
RNGFND7_PWRRNG,0
RNGFND7_RMETRIC,1
RNGFND7_SCALING,3
RNGFND7_STOP_PIN,-1
RNGFND7_TYPE,0
RNGFND8_ADDR,0
RNGFND8_FUNCTION,0
RNGFND8_GNDCLEAR,10
RNGFND8_MAX_CM,700
RNGFND8_MIN_CM,20
RNGFND8_OFFSET,0
RNGFND8_ORIENT,0
RNGFND8_PIN,-1
RNGFND8_POS_X,0
RNGFND8_POS_Y,0
RNGFND8_POS_Z,0
RNGFND8_PWRRNG,0
RNGFND8_RMETRIC,1
RNGFND8_SCALING,3
RNGFND8_STOP_PIN,-1
RNGFND8_TYPE,0
RNGFND9_ADDR,0
RNGFND9_FUNCTION,0
RNGFND9_GNDCLEAR,10
RNGFND9_MAX_CM,700
RNGFND9_MIN_CM,20
RNGFND9_OFFSET,0
RNGFND9_ORIENT,0
RNGFND9_PIN,-1
RNGFND9_POS_X,0
RNGFND9_POS_Y,0
RNGFND9_POS_Z,0
RNGFND9_PWRRNG,0
RNGFND9_RMETRIC,1
RNGFND9_SCALING,3
RNGFND9_STOP_PIN,-1
RNGFND9_TYPE,0
RNGFNDA_ADDR,0
RNGFNDA_FUNCTION,0
RNGFNDA_GNDCLEAR,10
RNGFNDA_MAX_CM,700
RNGFNDA_MIN_CM,20
RNGFNDA_OFFSET,0
RNGFNDA_ORIENT,0
RNGFNDA_PIN,-1
RNGFNDA_POS_X,0
RNGFNDA_POS_Y,0
RNGFNDA_POS_Z,0
RNGFNDA_PWRRNG,0
RNGFNDA_RMETRIC,1
RNGFNDA_SCALING,3
RNGFNDA_STOP_PIN,-1
RNGFNDA_TYPE,0
RPM_MAX,100000
RPM_MIN,10
RPM_MIN_QUAL,0.5
RPM_PIN,54
RPM_SCALING,1
RPM_TYPE,0
RPM2_PIN,-1
RPM2_SCALING,1
RPM2_TYPE,0
RSSI_TYPE,0
RST_SWITCH_CH,0
RTL_SPEED,0.5
SAIL_ENABLE,0
SCHED_DEBUG,0
SCHED_LOOP_RATE,50
SCR_ENABLE,0
SERIAL_PASS1,0
SERIAL_PASS2,-1
SERIAL_PASSTIMO,15
SERIAL0_BAUD,115
SERIAL0_PROTOCOL,2
SERIAL1_BAUD,57
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,1
SERIAL2_BAUD,57
SERIAL2_OPTIONS,0
SERIAL2_PROTOCOL,1
SERIAL3_BAUD,38
SERIAL3_OPTIONS,0
SERIAL3_PROTOCOL,5
SERIAL4_BAUD,38
SERIAL4_OPTIONS,0
SERIAL4_PROTOCOL,5
SERIAL5_BAUD,57
SERIAL5_OPTIONS,0
SERIAL5_PROTOCOL,-1
SERIAL6_BAUD,57
SERIAL6_OPTIONS,0
SERIAL6_PROTOCOL,-1
SERIAL7_BAUD,115200
SERIAL7_OPTIONS,0
SERIAL7_PROTOCOL,2
SERVO_BLH_DEBUG,0
SERVO_BLH_MASK,0
SERVO_BLH_OTYPE,0
SERVO_BLH_POLES,14
SERVO_BLH_PORT,0
SERVO_BLH_REMASK,0
SERVO_BLH_TEST,0
SERVO_BLH_TMOUT,0
SERVO_BLH_TRATE,10
SERVO_RATE,50
SERVO_ROB_POSMAX,4095
SERVO_ROB_POSMIN,0
SERVO_SBUS_RATE,50
SERVO_VOLZ_MASK,0
SERVO1_FUNCTION,1
SERVO1_MAX,1900
SERVO1_MIN,1100
SERVO1_REVERSED,0
SERVO1_TRIM,1500
SERVO10_FUNCTION,0
SERVO10_MAX,1900
SERVO10_MIN,1100
SERVO10_REVERSED,0
SERVO10_TRIM,1500
SERVO11_FUNCTION,0
SERVO11_MAX,1900
SERVO11_MIN,1100
SERVO11_REVERSED,0
SERVO11_TRIM,1500
SERVO12_FUNCTION,1
SERVO12_MAX,1900
SERVO12_MIN,1100
SERVO12_REVERSED,0
SERVO12_TRIM,1500
SERVO13_FUNCTION,0
SERVO13_MAX,1900
SERVO13_MIN,1100
SERVO13_REVERSED,0
SERVO13_TRIM,1500
SERVO14_FUNCTION,0
SERVO14_MAX,1900
SERVO14_MIN,1100
SERVO14_REVERSED,0
SERVO14_TRIM,1500
SERVO15_FUNCTION,0
SERVO15_MAX,1900
SERVO15_MIN,1100
SERVO15_REVERSED,0
SERVO15_TRIM,1500
SERVO16_FUNCTION,0
SERVO16_MAX,1900
SERVO16_MIN,1100
SERVO16_REVERSED,0
SERVO16_TRIM,1500
SERVO2_FUNCTION,26
SERVO2_MAX,1900
SERVO2_MIN,1100
SERVO2_REVERSED,0
SERVO2_TRIM,1500
SERVO3_FUNCTION,1
SERVO3_MAX,1900
SERVO3_MIN,1100
SERVO3_REVERSED,0
SERVO3_TRIM,1500
SERVO4_FUNCTION,70
SERVO4_MAX,1900
SERVO4_MIN,1100
SERVO4_REVERSED,0
SERVO4_TRIM,1500
SERVO5_FUNCTION,1
SERVO5_MAX,1900
SERVO5_MIN,1100
SERVO5_REVERSED,0
SERVO5_TRIM,1500
SERVO6_FUNCTION,1
SERVO6_MAX,1900
SERVO6_MIN,1100
SERVO6_REVERSED,0
SERVO6_TRIM,1500
SERVO7_FUNCTION,1
SERVO7_MAX,1900
SERVO7_MIN,1100
SERVO7_REVERSED,0
SERVO7_TRIM,1500
SERVO8_FUNCTION,1
SERVO8_MAX,1900
SERVO8_MIN,1100
SERVO8_REVERSED,0
SERVO8_TRIM,1500
SERVO9_FUNCTION,1
SERVO9_MAX,1900
SERVO9_MIN,1100
SERVO9_REVERSED,0
SERVO9_TRIM,1500
SIMPLE_TYPE,0
SPEED_MAX,0
SPRAY_ENABLE,0
SR0_ADSB,0
SR0_EXT_STAT,1
SR0_EXTRA1,1
SR0_EXTRA2,1
SR0_EXTRA3,1
SR0_PARAMS,10
SR0_POSITION,1
SR0_RAW_CTRL,1
SR0_RAW_SENS,1
SR0_RC_CHAN,1
SR1_ADSB,0
SR1_EXT_STAT,2
SR1_EXTRA1,4
SR1_EXTRA2,4
SR1_EXTRA3,2
SR1_PARAMS,10
SR1_POSITION,2
SR1_RAW_CTRL,1
SR1_RAW_SENS,2
SR1_RC_CHAN,2
SR2_ADSB,0
SR2_EXT_STAT,1
SR2_EXTRA1,1
SR2_EXTRA2,1
SR2_EXTRA3,1
SR2_PARAMS,10
SR2_POSITION,1
SR2_RAW_CTRL,1
SR2_RAW_SENS,1
SR2_RC_CHAN,1
SR3_ADSB,0
SR3_EXT_STAT,1
SR3_EXTRA1,1
SR3_EXTRA2,1
SR3_EXTRA3,1
SR3_PARAMS,10
SR3_POSITION,1
SR3_RAW_CTRL,1
SR3_RAW_SENS,1
SR3_RC_CHAN,1
SRTL_ACCURACY,2
SRTL_POINTS,300
STAT_BOOTCNT,20
STAT_FLTTIME,17719
STAT_RESET,1.650902E+08
STAT_RUNTIME,24986
STICK_MIXING,0
SYSID_ENFORCE,0
SYSID_MYGCS,255
SYSID_THISMAV,1
TELEM_DELAY,0
TURN_MAX_G,0.6
TURN_RADIUS,0.9
VISO_ORIENT,0
VISO_POS_X,0
VISO_POS_Y,0
VISO_POS_Z,0
VISO_TYPE,0
WENC_TYPE,0
WNDVN_TYPE,0
WP_OVERSHOOT,2
WP_PIVOT_ANGLE,60
WP_PIVOT_RATE,90
WP_RADIUS,2
WP_SPEED,0.2
WP_SPEED_MIN,0
WRC_ENABLE,0