Hello,
I am creating an autopilot control system for a Jaguar rover from DrRobot using a raspberry as a flight controller.
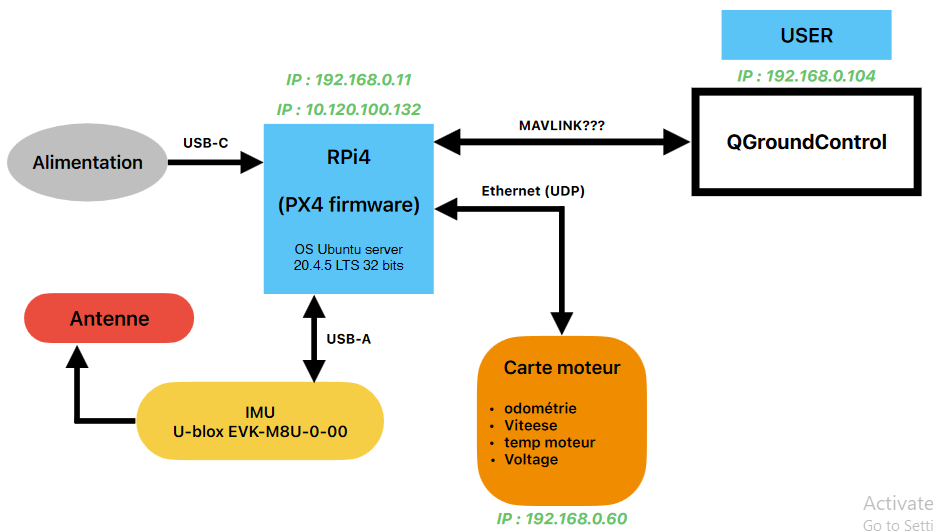
Here my configuration :
PX4 firmware (SCUMAKER_PILOTPI v1.14.0.80) on rpi4 (os ubuntu server 20.4.5 LTS 32bits)
Connected to QGroundControl (v4.2.6) via mavlink with the command (mavlink start -u “port” -t “ipadress”)
Motor controller in ethernet UDP
IMU u-blox EVK-M8U-0-00 with USB-A
However, as soon as I connect my firmware to QGroundControl, some parameters are missing (SYS_AUTOSTART; COM_RC_IN_MODE; RC_MAP_ …)
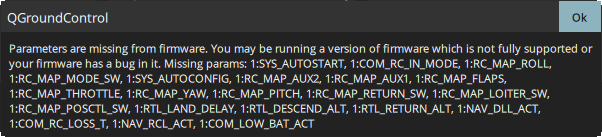
“Parameters missing from firmware” and "your vehicule
I tried to set them up manually by entering in the console : param set “parameter” “value” one by one with a default value but it doesn’t work cause the warning message and I still get stuck in configuration process.
Thanks for your time.