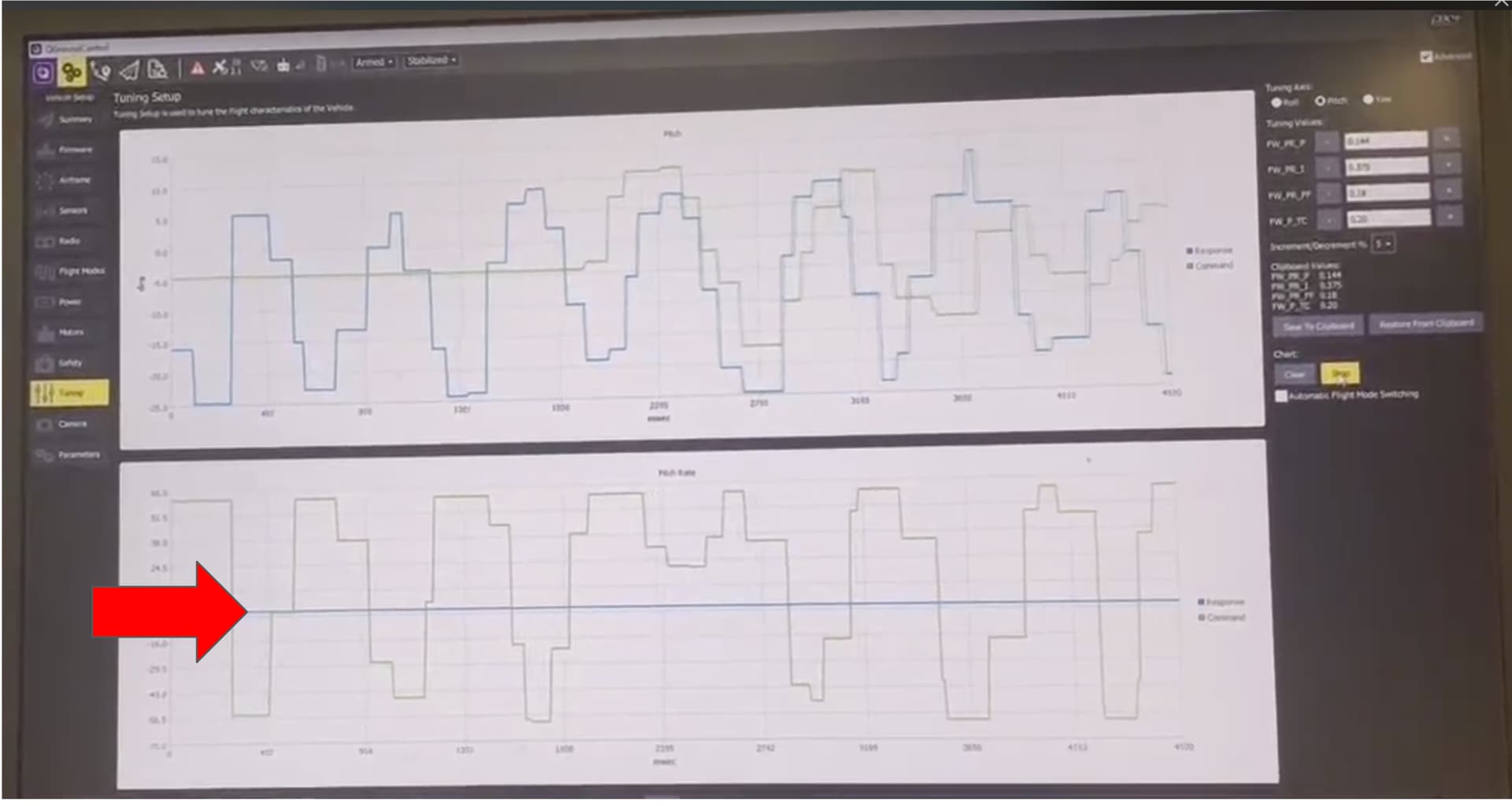
Trying to tune an airplane controller using QGround with PX4. In the Tuning page the live data for the pitch rate is missing. Is this a configuration problem on my end? Thank you for your help.
For reference, I am using QGC 4.0.0. It seems a lot of the real-time chart code is removed from the newer QGC code. I am attempting to debug and compile QGC 4.0.0. Getting QT configured is a bit of a bear. I am still not sure if this is a bug or a configuration problem on my end. Always learning. Thank you in advance for your help.
You need to be in Position mode or Altitude mode. You’re in stabilized.
Try that and see if pitch pops up.
Thank you ryanjAA. I messed around trying that a bit but it doesn’t seem to have the rate gains tunable in those modes. I found some other issues/approaches that I’ll post below. Thank you again for replying.
For posterity, here are some notes on how I got the tuning tab working with all the needed sensor data:
Stuff that matters for getting all the rates and commands in the tuning tab for FW in QGC 4.0.11:
-There are different MAV_link messages that can be downlinked over telemetry. Some do not seem to include certain sensor data.
–To get all the tuning sensor data you can include the “Onboard” MAV_link message in a telemetry stream. There may be others msgs that work. “Normal”, the default, does not work. Parameter is called MAV_0_Mode where 0 can be any MAV channel
-There is more data downlinked via “Onboard” slowing the data rate on the GCS. It is probably named “Onboard” for a reason. Increasing baud makes the system more useable for tuning. However:
–Telem 1 downlink baud rate seems to be hard coded to 57600 baud for MAV_link messages (though not for other devices). This was annoying to discover the hard way, though was found partially documented in some corner of the QGC or PX4 documentation.
–Telem 2 can be bound to MAV_link msg “Onboard” at any baud of interest.
—Set MAV_1_Config to “Telem 2”. Plug radio into Telem 2 port
—Set MAV_1_MODE to “Onboard”
—Adjust MAV_1_RATE to a number that makes sense. (4096 was a good balance of speed and data down-sampling)
—Adjust baud of Pixhawk, Radios (using mfg SW), and Windows port
-Some high baud rates cause parameter errors during connection using the RFD900x radios. 230400 baud is working for me. 460800 baud cause parameter download problems for certain parameters. I would like to use this baud as the latency was quite good but I do not feel like trouble shooting the parameter downlink problems.
-Changing baud and the magnitude of the MAV_1_RATE parameter balance data rate and amount of down-sampling (like zero-order hold between data updates) that is seen in sensor data.
Related COM port learnings:
-QGC would not auto-connect to the RFD900x radio after the baud rate was increased.
–You can create manually create and connect to COM devices in QGC. Purple button top left - > Comm Links.
–You may be blocked from connecting manually to a COM port in QGC by the auto-connect feature.
—Uncheck all the auto-connect checkboxes. Purple button top left → General → Autoconnect … uncheck em’ all
—This is an interesting read for COM auto-connect in QGC Manual connection to serial port not working without unticking Pixhawk and SiK radio options · Issue #6666 · mavlink/qgroundcontrol · GitHub
-You may have to run QGC as Administrator to access COM port after you change baud. This feels gross.
-You can change baud rate in Device Manager COM port settings. This may or may not matter
-Might be obvious, but you need to change the baud on the radios using the radio manufacturers software.
-Turning off “Fast-Startup” in “control panel->Power Options->Control what power buttons do” may or may not help stability when a device gets unplugged/reboot.
-If in doubt reboot! COM issues fixes seem inexplicably tied to rebooting
I plan to try all this using QGC on Linux to see if the experience is more reliable (especially COM ports).
For context, I am using Dell XPS laptop with Windows 10 Pro, RFD900x radios, and the Pixhawk Orange Cube with PX4 version 1.13.0dev, and QGC 4.0.11. This may or may not be the right/wrong combo to use.
I’ll take a look in detail at your post but the comm port issues is a windows side issue (maybe QGC versions related) but auto connect stopped working awhile ago. It’s works fine on mac and iirc Linux too.
Ok, awesome. Thank you! Yes, I am looking forward to trying out Linux for this. I expect it is more stable. The short of it is that adding the “Onboard” MAVlink message to the downlink adds the sensor data of interest in that tuning tab. Then one just needs to massage the serial settings to get enough downlink speed to be useable.
I think there is a note somewhere that you need a high speed link given the required data. You could probably turn the data rate super high on an rfd900 serial module and maybe get away with it.