I’m new to PX4 and just got my Nxt-Px4V2. I have a few questions as I plan to use PX4 to fly my quadcopter and integrate an analog system for BVLOS (Beyond Visual Line of Sight) flying. I’d really appreciate some guidance on the following:
Analog FPV Integration:
How can I integrate an analog FPV system (VTX + Camera) with the Nxt-Px4V2, considering it supports DJI O3?
Telemetry Stream:
I might be mistaken, but has anyone tested ELRS for telemetry streaming using the LUA script? My goal is to stream telemetry data to QGC running on my mobile, connected to the RadioMaster Pocket.
Thanks in advance for taking the time to help me out with these queries! @Peize-Liu
I was looking at that board with some curiosity. At the moment I’m using the matek h743. I’ve tried a bunch of things trying to get telemetry into a tx16s, but without any luck. I really wanted to get the current GPS location on the screen like a DJI drone does.
Hey! @dronesalot I found but not tested, I guess ELRS - Mavlink looks good. You can try that, earlier it was ELRS Airport which used two receivers one for radio and the other telem data. But I guess ELRS MAVLINK will meet your requirement.
Greeting!
I’ve just successfully used ELRS-MAVLink for telemetry. It’s quite simple MAVLink - ExpressLRS can be helpful.
Note that both the Tx and Rx should be running ELRS version >3.5. After updating, you can simply modify a few parameters of PX4 in QGC, and everything should work.
Good luck!
I’m also looking for solutions for OSD because I couldn’t get my Avatar HD to work with PX4 (no OSD information on the screen, although the msp_osd status seems fine).
Hey! @XJH-Jorhai I did follow the Mavlink - ExpressLRS guide, but I had no luck. May I know which Px4 version are you running, and the parameter lists that you changed, as the Nxtpx4 is using RCin as primary causing some confusion on configuring in Mav / telem ports.Also am running Px4 - ver 15.1. I have upgraded the radio and the rx.
First you can try connecting your Rx to another port such as SEL_TEL1 instead of SEL_RC and try again
If it still not working, follow to disable the rc_input
By NxtPX4v2’s web.It uses hkust_nxt-dual target.
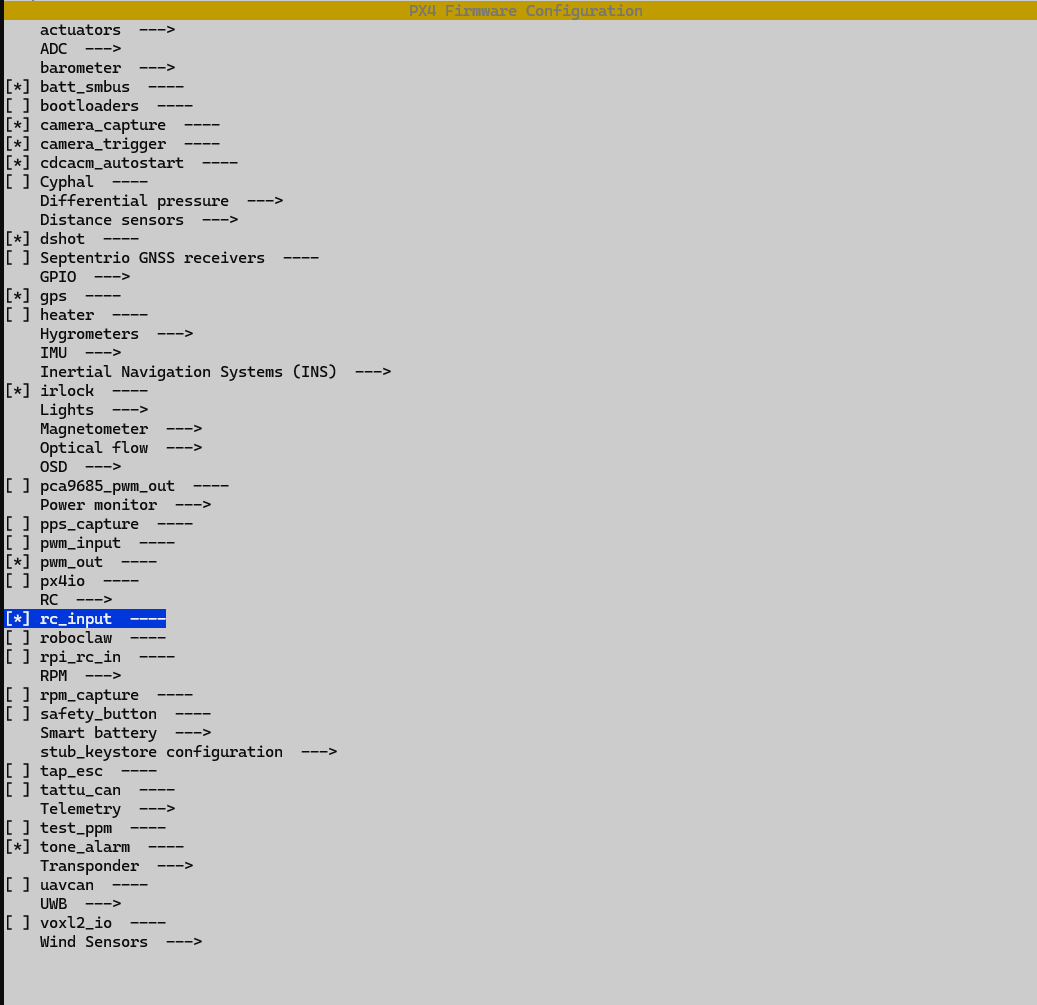
So after setting up Px4 compiling enviroment, run make hkust_nxt-dual boardconfig
you can go on configuring the firmware
In drivers you can find an
[*]rc_input
roll down to it and enter
the * should be removed and now the firmware that you compiled will not using common rc
after configuring those , save and quit then run make hkust_nxt-dual
if everything goes well you can get an .PX4 in
PX4-Autopilot/build/hkust_nxt-dual_default/hkust_nxt-dual_default.px4
uses QGC to upgrade your firmware into your NxtPx4
version and parameters that you’ve asked:
I’m using PX4 version 1.15.2, and it shouldn’t be much different from 1.15.1
I connects my Rx on TELEM1 of my Pixhawk 6c mini by Holybro
so parameter I’ve changed:
Configure SER_TELx_BAUD to 460800 8N1
Configure MAVLink with MAV_0_CONFIG to TELEM1
Configure MAVLink sending rate with MAV_0_RATE to 9600 B/s
the same as the Mavlink - ExpressLRS website
and the other parameters should be irrelevant for that
@carbon
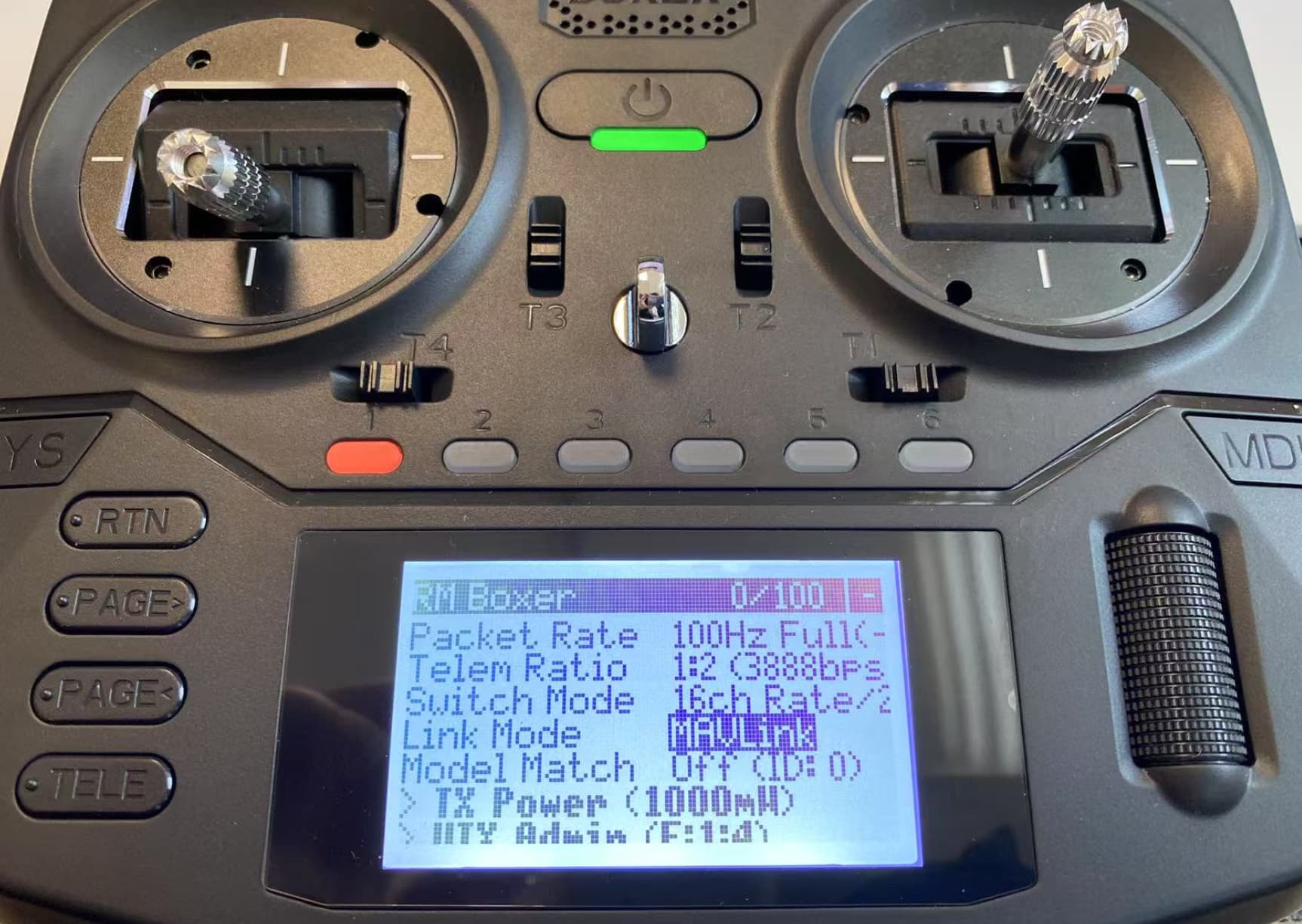
Check if you have switched both the TX and RX to MAVLink mode.
For me, I’m using the RadioMaster Boxer, and the configuration in the ELRS script looks like this:
If you have bound your RX, you should be able to access its configuration board, which also has a “Link Mode” option.(Sorry for not providing the image, my drone is currently out of access.)
M
If it’s not set to MAVLink mode, turn it to MAVLink mode and try again.
Also, have you had success connecting your TX through Wi-Fi?
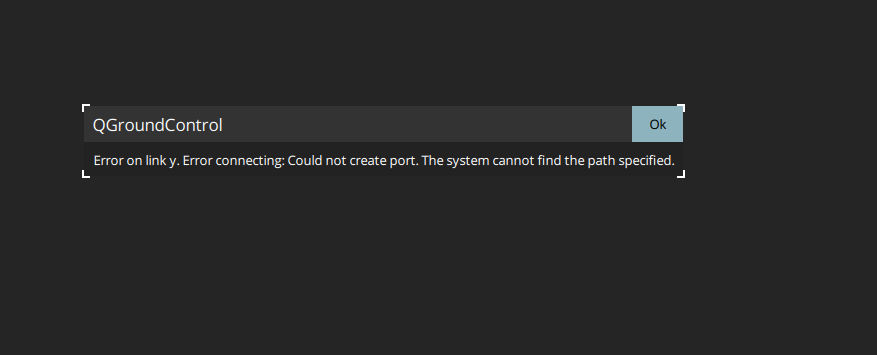
Hey I have the WIFI from the Transmitter showing up and also both the RX and TX are streaming in Mavlink and am using Px4 version 1.15.4 - but we are not able to establish the connection between the radio and the GCS (Qground contorl). On the fimrware side we are not able to enable SER_TELx_BAUD - as in our case SER_TEL1_BAUD is not showing when searching for this. Morever we have connected the radio to TELEM1(UART2) instead of the radio port.
Hey @XJH-Jorhai I appreaciate your efforts in making this possible but, couldnt get it up and runing. I got a telemetry module that does the same funtion. But, will work on implementin this function on the next model and I will ensure that you know how it goes. Thanks ! have Safe landings! and longer flights !
No worries at all! I’m glad you found a solution that works for you. Looking forward to seeing how you implement it in the next model
Wishing you smooth flights, safe landings. Fly high!