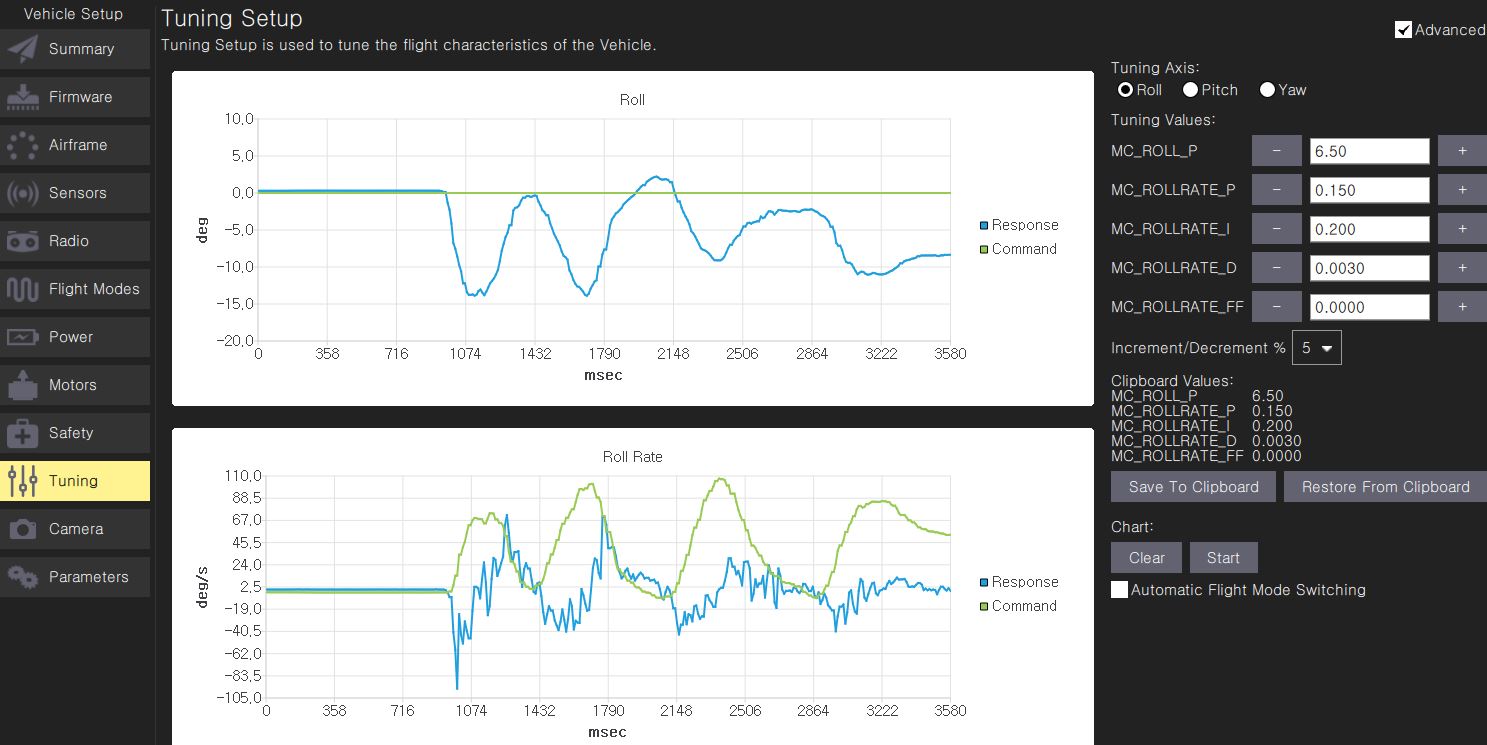
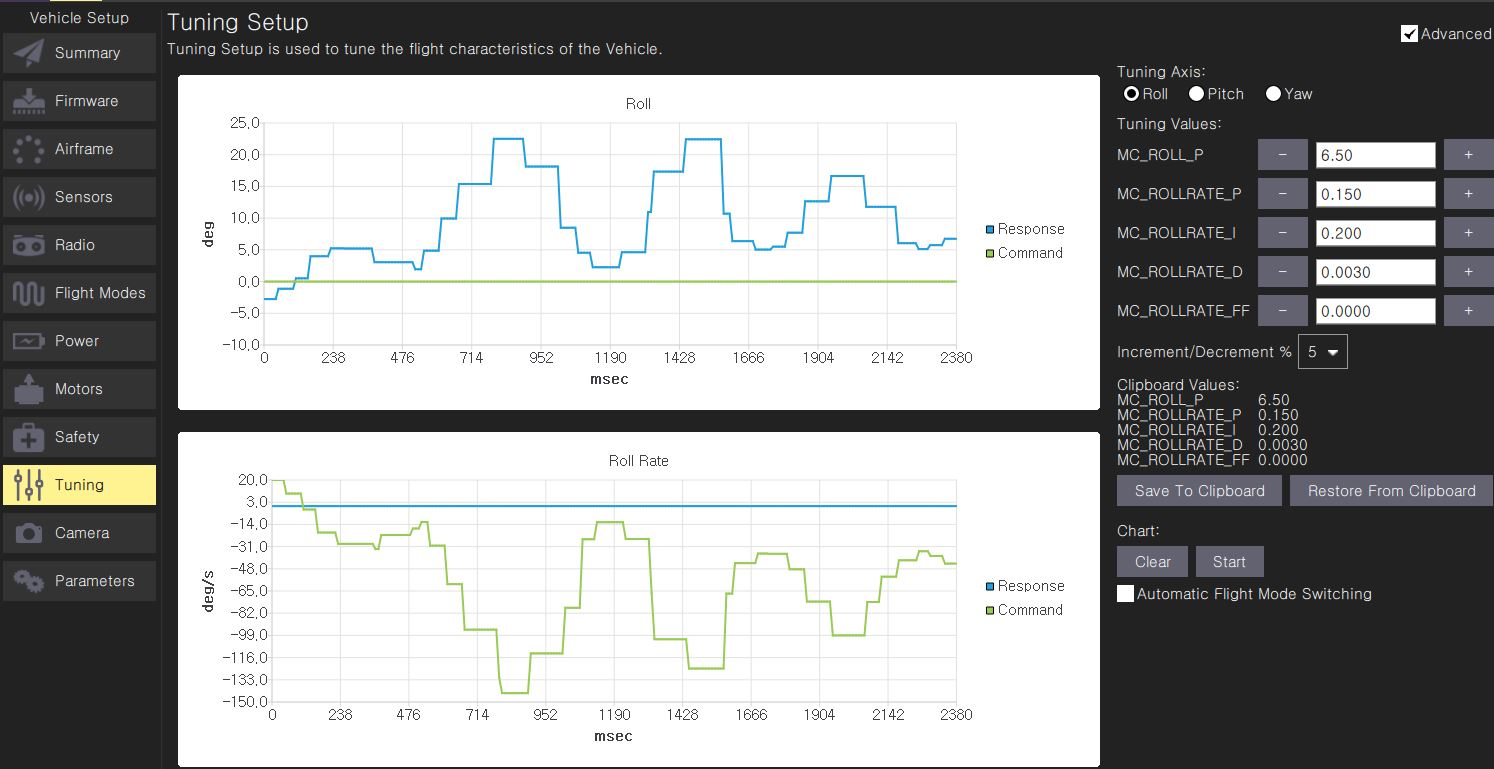
However, when I tested by telemetry(Holybro) connecting the pixhawk4, the response of Roll Rate does not respond and the response cycle is very slow as shown in the figure below.
What is the bandwidth of your telemetry module? Telemetry modules in general do not have high bandwidth so seems like the difference is in the bandwidth
@jongbeom.her Yes, or even a serial link to the mission computer which routes mavlink to wifi is sufficient for this. (I recall your system has a mission computer onboard)
900MHz modules still have quite low bandwidth as it is designed for long range low bandwidth communications. Have you checked the data rate of your 900MHz telemetry module?
900MHz telemetry module is also 115200 max baudrate, I think almost RF telemetry has same rate.
So, next step I will try Wifi module.
Actually we don’t use onboard computer to PID tune.
I have a plane, Pixhawk + ESP8266 Wifi ↔ Laptop PC for tuning.
As you said, we use onboard computer for flight mission.
So, I have a idea to make a advance tuning setup tool by self using ros rqt graph.
We already get attitude and rate response by ros message.
However, we can get a command attitude and rate by ros message from PX4 to make tuning graph like above picture?
@jongbeom.her baudrate is not equivalent with bandwidth, and for your application 115200 is not high enough IMHO.
Baudrates are the rate your data moves through the UART interface. This doesn’t mean that you will have data throughput through the communication medium (AFSK for 433MHz Sik Radio modules)
I didn’t understand your second question properly. Are you asking if it is possible to create the same graph through rqt? of course