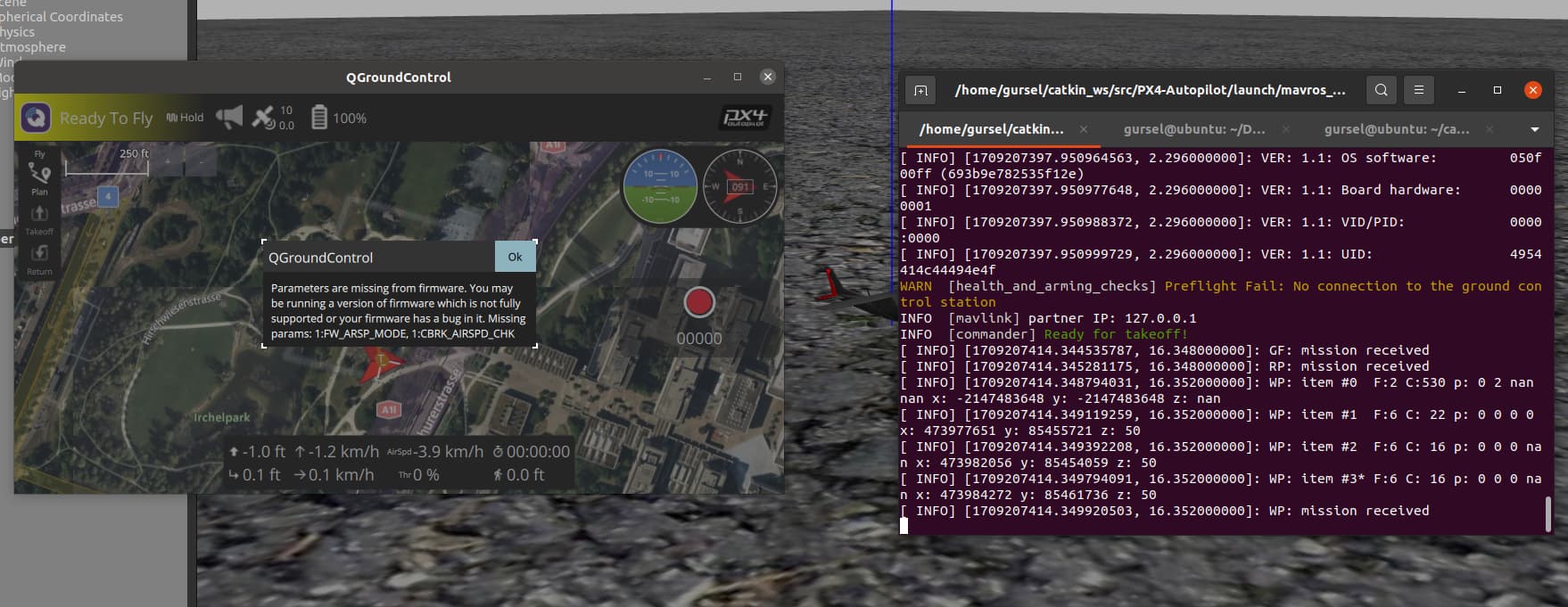
+1 here, I am getting a FW_ARSP_MODE missing parameter.
Pixhawk 2.4.8 and QGroundControl v. 4.3.0 (latest stable I think), fixed-wing config (Generic Standard Plane), AirSpeed sensor connected
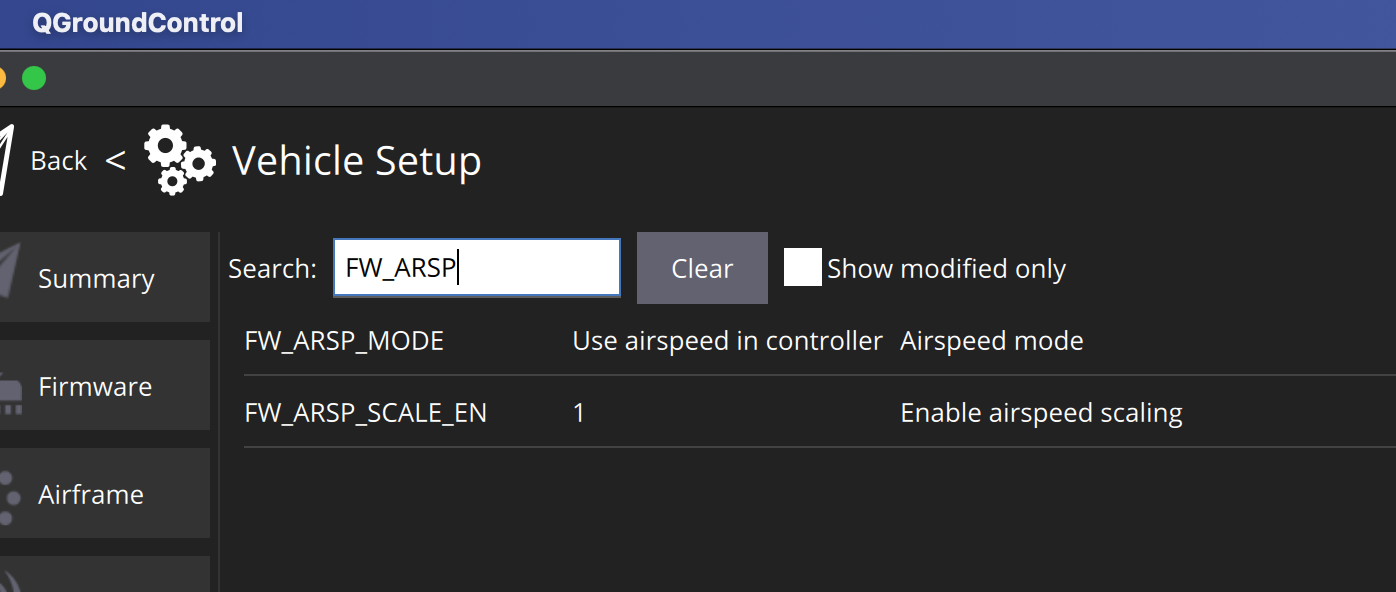
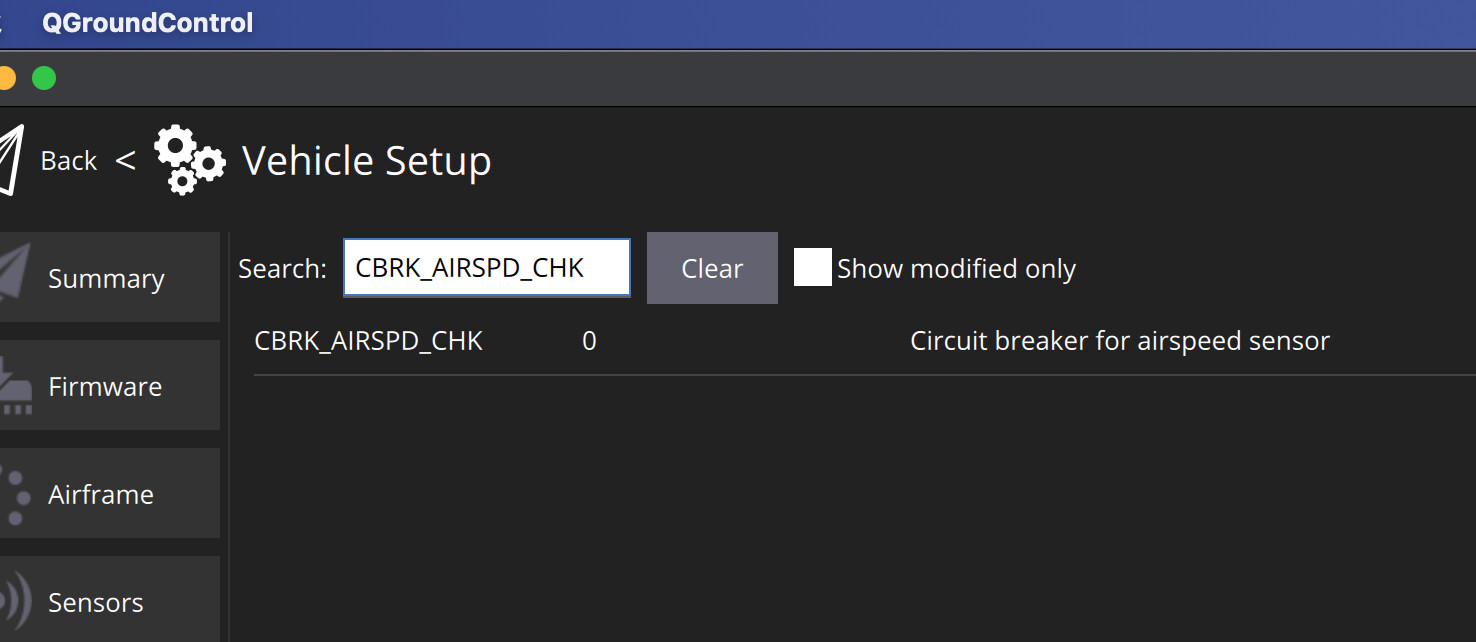
Mates, following my previous exploration, I searched in the documentation for the parameters, both in the current, where these both are missing, and in a couple of old ones, v.1.13 and v.1.11, where both are present.
I tried to build the FW, but some issues, so, I opted for searching for the firmware for these old versions published in the official repository: https://github.com/PX4/PX4-Autopilot/releases/tag/v1.13.3 and v1.11.3.
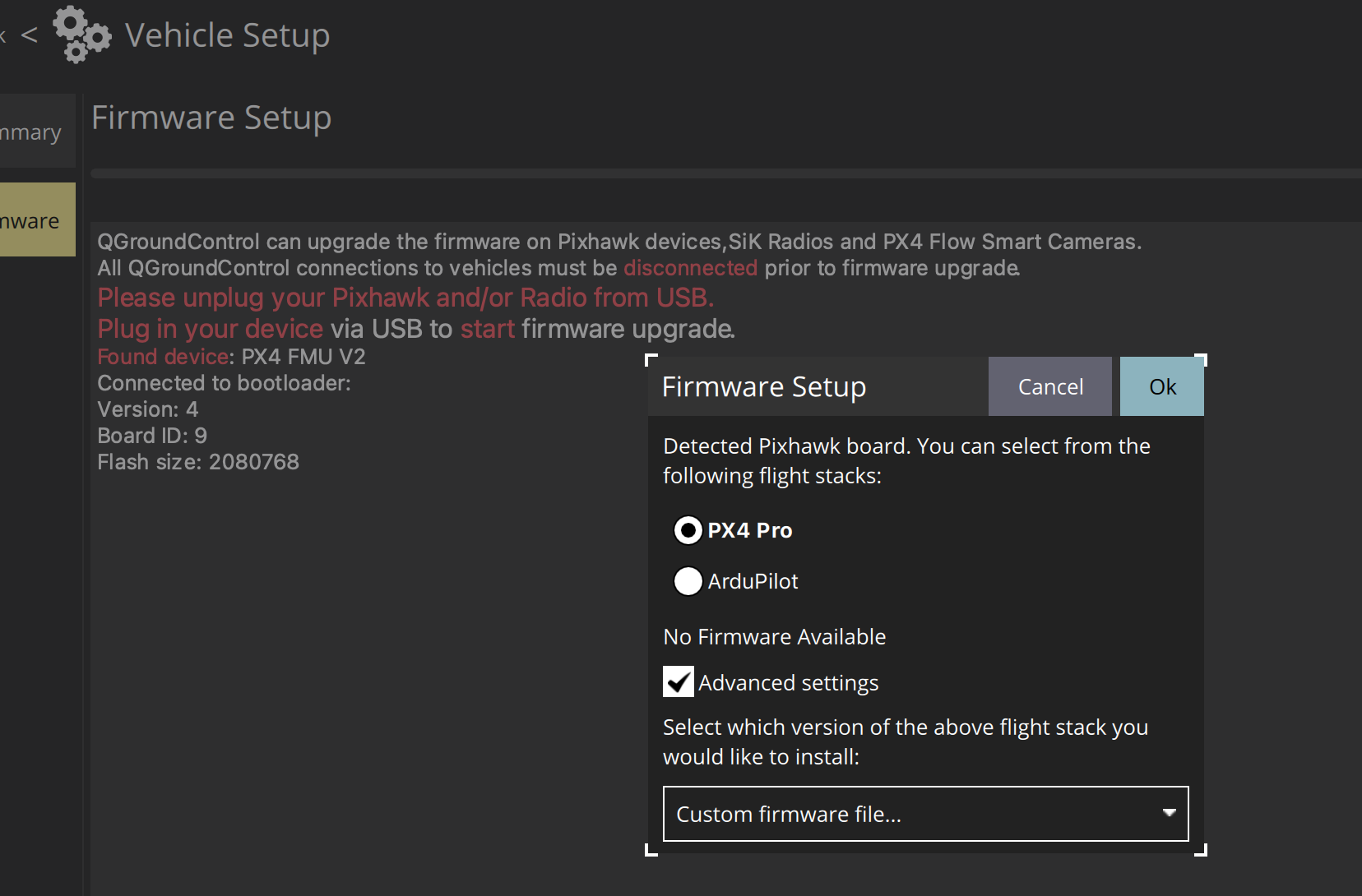
Once downloaded these for the right FMU and airframe, let’s say px4_fmu-v2_fixedwing.px4, in QGroundControl/Firmware Setup, you can select advanced tab, and select “Custom firmware file”.
*As a side note: V. 1.11.3 sensors calibration seems more slow, but I could calibrate the Airspeed sensor, although the result seemed not stable… same regarding the compass, both were not stable and oscillating without a reason… * In v.1.13.3, the general calibration process seems improved, compass stable, but I am having trouble to calibrate the Airspeed sensor, the process fails all the time. [Edit] Airspeed sensor needs to be enabled: Airspeed Calibration | PX4 Guide (main) … I enabled the model I am using, and I could calibrate it nicely. All works well.
Summarising: using an old firmware, if I understood right, from 1.11 (apparently when airspeed sensors started to be supported) to 1.13 that is the way to get these parameters listed again, so, just downgrading to the previous version.