Hi!
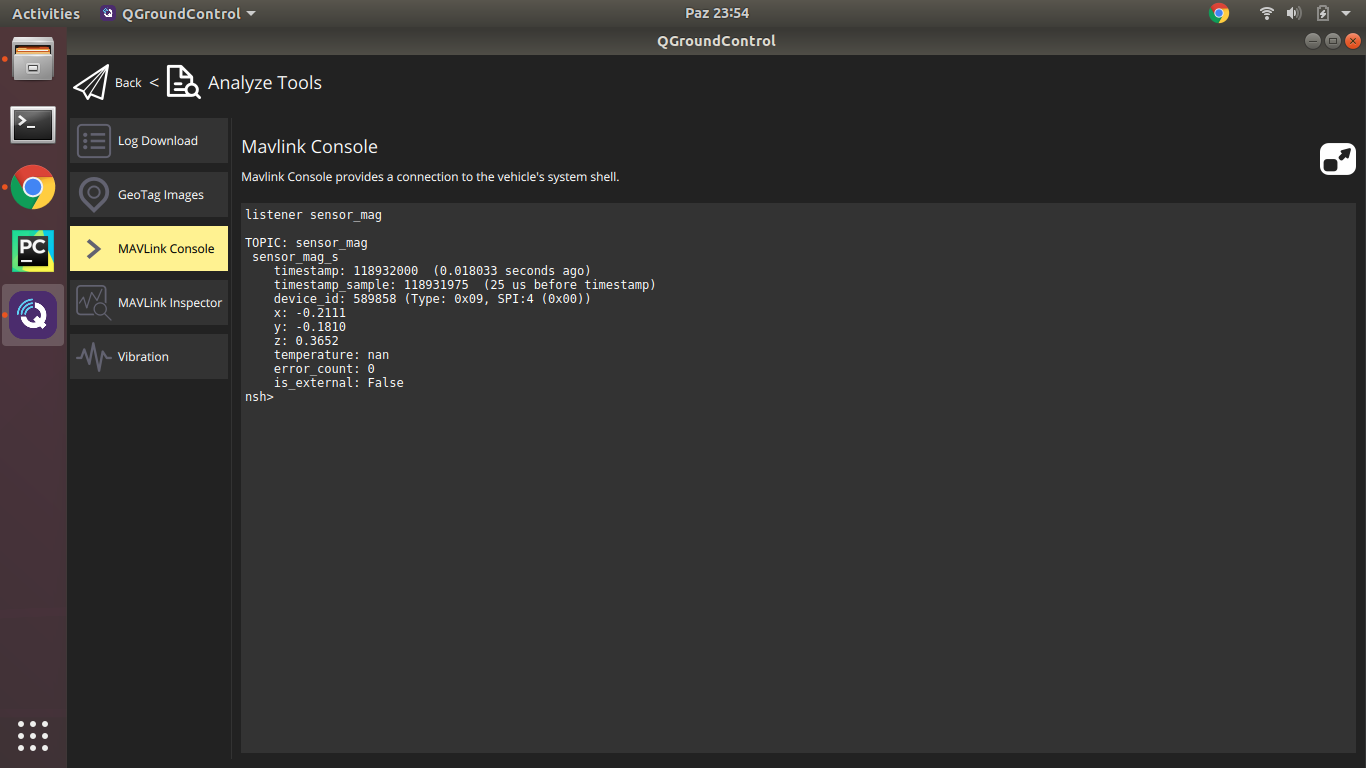
I have HERE3, Pixhawk Cube Orange and I connected Here 3 with can1 port. Altough I cant see external compass. What should I do to use external compass?
That topic is why I want to use external compass: If I give higher thr 2 motors are spin slowly and stop issue - #2 by Retro-meb