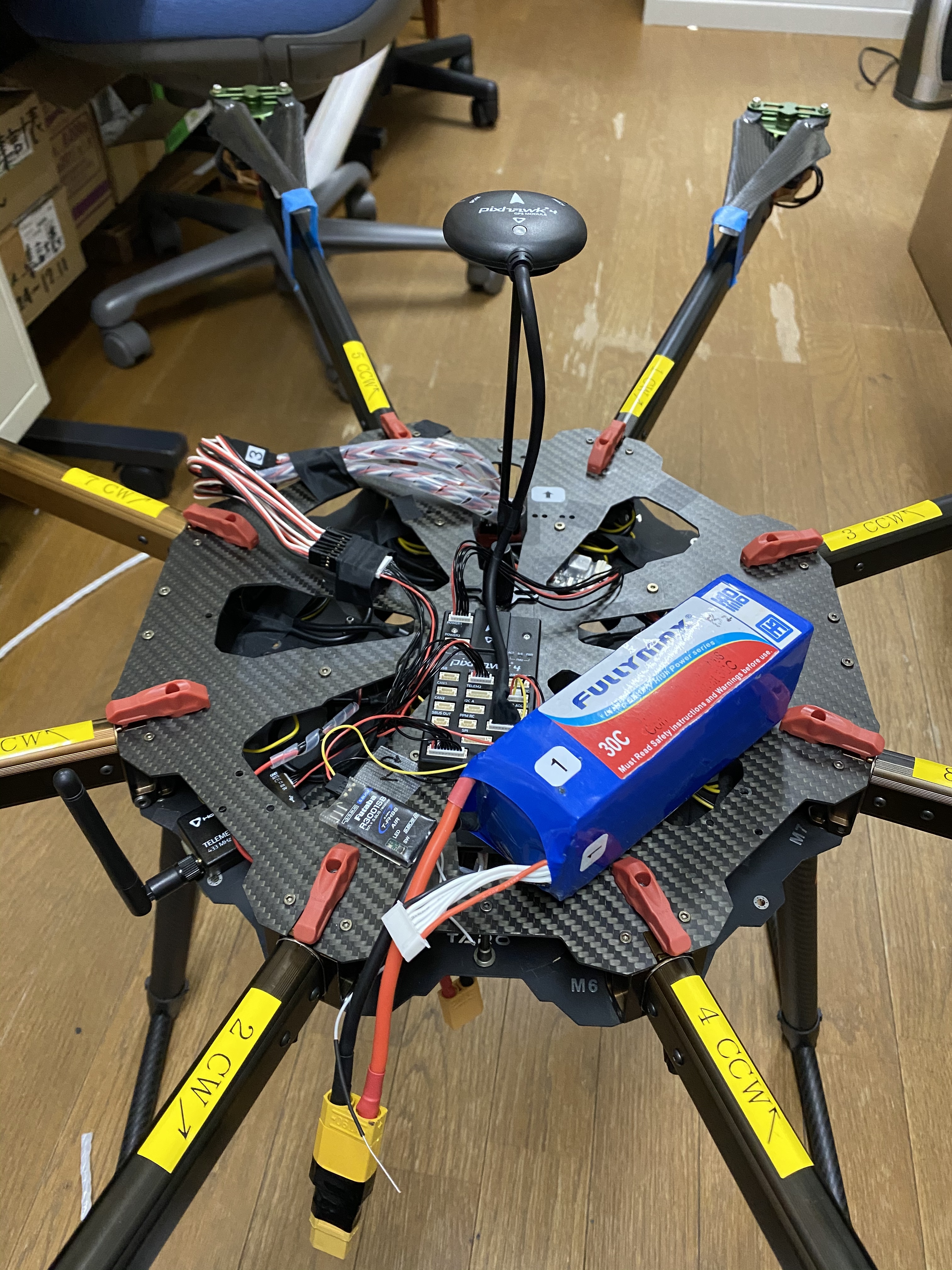
I am looking for to suitable PIDs for Tarot X8 Octocopter.(motor to motor 1050mm)
The first flight was unstable and not easy to land .
Anybody knows? Any recommendations !
Holybro Pixhawk px4/QGC
I am looking for to suitable PIDs for Tarot X8 Octocopter.(motor to motor 1050mm)
The first flight was unstable and not easy to land .
Anybody knows? Any recommendations !
Holybro Pixhawk px4/QGC
Can you post a log file?
Thank you for the reply!
Once I disconcected usb cable to FC , I could not find any logs in QGC and
I have to download them to PC ! Next time I’ll do ,then post a log file.
One of unstable reasons was " not calibrating ESC" or tightening props.
https://logs.px4.io/plot_app?log=f22126da-f80e-4500-a9fa-3ca484025d47
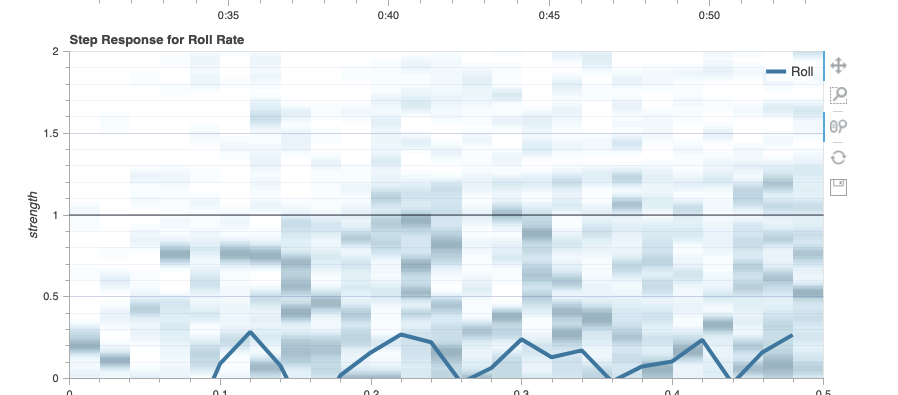
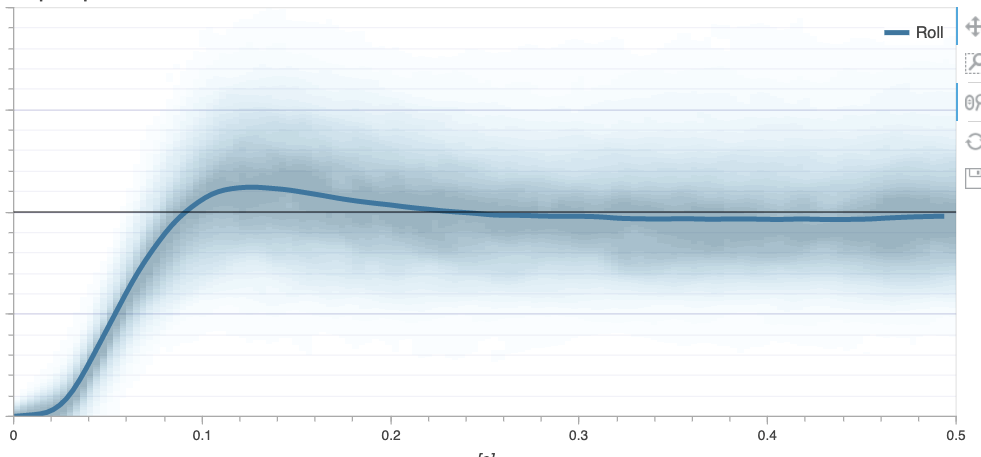
After arming, a few arms(motors) shaking ,hovering not stable,
throlle up and then lost balance ,no yawing controll ,fell down from 2m ,broke carbon skid.
Hi @precog.
I believe you are using ESC with PWM inputs right? If so, have you tried to calibrate them as per the following link?
Thank you ! This is picture of esc . Flycolor 30A OPTO 2-6S IMG_1042.PNG|231x500
I 've done this ESC Calibration of link , but did not work well.
Different from betaflight , calibration beep sound ends quickly in a few seconds.
My friend could control correctly this X8 Octocopter by DJI A3 pro, but…
This flight logs I tested last night( ESC calibration agarin, MOTOR clockwise checkedhttps://logs.px4.io/plot_app?log=e6eaa451-525c-4011-abf1-c9885e5c18bf )
After arming, arms, motors never stopped shaking.
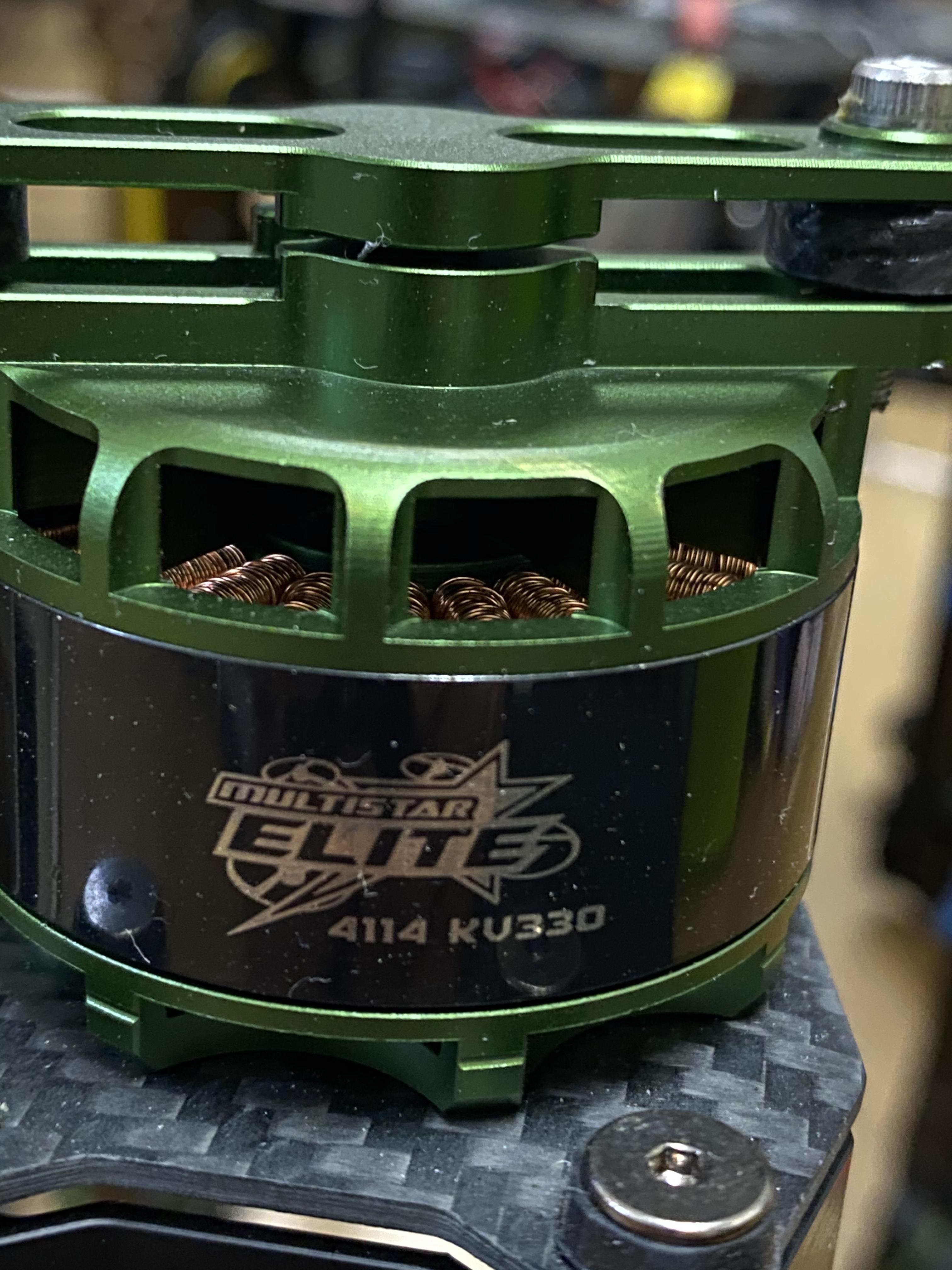
This is due to a mechanical problem. Un balanced propellers, motors not lined up or something else since we can not inspect your physical set up it is hard to say.
If you don’t see anything you should research this in hopes that you might.
Thank you for the advice.
I changed firmware from px4&QGC to ardupirot &mission planner.
Unfortunately with the same results ,vibrations &shaking .
I did not feel like hovering and flying it.
Without props , it seems works well ,but once I put props on it…
Not sure why you did anything to the firmware. Please re-read my previous post and follow the advice.
"This is due to a mechanical problem. Un balanced propellers, motors not lined up or something else since we can not inspect your physical set up it is hard to say.
If you don’t see anything you should research this in hopes that you might."
My friend could fly this tarot octocopter by Dji A3 pro with same conditions.
He said there is no mechanical problems at all.
Differences between two FC are motor orders and direction of rotation.
I have tried many flight controllers like cc3d ,cleanflight ,betaflight, raceflight,FL1,
troubles happen by installation failures ,firmware miss matching, default pids .
I think next step is to adjust PIDs ( make them half values )




{kind=link}