I searched the forum to see if anyone had experienced something like this before, but I couldn’t find it. If there is another topic, please excuse me. I’ve had problems with the engine before and I’ve solved them. I started flying and successfully performed the first flight. On the second flight, my plan was to do straight back and forth (in stabilized mode) I did it forward, but on the way back, the drone awkwardly somersaulted and crashed. If my observations are correct, one of the motors turned off in midair. I’ll be happy if you can help me.
Hi @Cihangun_Ayyildiz ,
Sorry to hear about your crash.
To me it looks like the vehicle just lacks of yaw authority. During deceleration, the vehicle did climb due to its lift and the yaw authority wasn’t enough to keep the vehicle’s heading in place.
Seeing this, the pilot reduced thrust to 0, crashing the drone (you can clearly see in the 3D view that the drone first started to loose yaw and then flipped when the throttle stick was at 0: 3D View - Flight Review).
Two thing to do:
Align the motors properly or even tilt them in the direction where they would increase the yaw authority of the vehicle
hi bresch,
First of all, thank you very much for your answer. Why did it do yaw even though I never gave yaw command? Please excuse me if I misunderstood you.
I also lowered the throttle to zero so that the engines would not be damaged when the car somersaulted and began to fall. I will try with Airmode but I don’t understand your first suggestion.
Why did it do yaw even though I never gave yaw command?
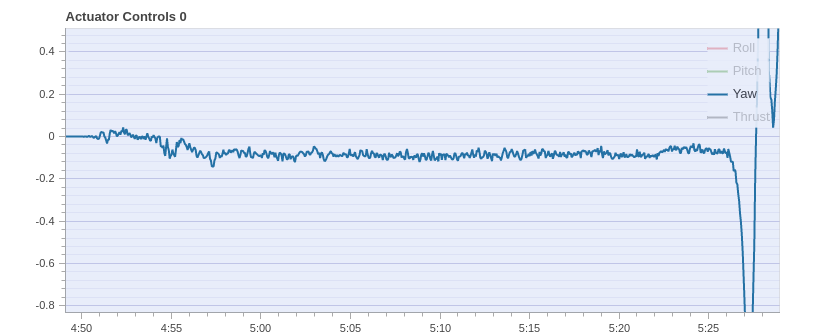
As shown on the plot attached, you can see that the done is constantly fighting a yaw disturbance (most likely created by a misalignment of the rotors).
It’s fine when there is enough motor range to control the roll/pitch of the drone, but when the mixer needs more roll/pitch torque, the yaw actuation is deprioritized and the drone starts to rotate due to the constant disturbance.
You really explained the situation wonderfully. thank you so much. I’ll try to align the motors right away. I actually leveled it with a spirit level. I don’t know what else to do, but I’ll look into the situation.
I have one last request. While the drone is flying in stabilized mode, it moves left-forward even in a windless environment. what could be the reason for this?
This means that he collective thrust vector points left-forwards when the autopilot is leveled (i.e: the propulsion system is not leveled when the autopilot is leveled). You can adjust the autopilot leveling physically or fine tune this using SENS_BOARD_X_OFF (roll) and SENS_BOARD_Y_OFF (pitch).