Now I have a bigger problem with yaw, when the copter takes off, yaw is out of control, the copter is rotated and I have to land.
Can anyone help me, thanks
Hi @Tan_Ph_m ,
Please upload the log file on logs.px4.io and share the link here. This could be a compass issue but it’s hard to tell without a log.
here: https://logs.px4.io/plot_app?log=f3373cf3-4bc2-4459-bbe9-258cbb7c36e4
thank u so much
https://logs.px4.io/plot_app?log=8b3f8d19-61c0-421b-94db-a4084373edc6
This is the flight I didn’t control yaw to be and the result is cash and fire esc
It looks that the done is trying to control yaw but can’t. Can you double check the rotation of each propeller? It should be like on that image: https://dev.px4.io/en/airframes/airframe_reference.html#hexarotor-x
Also make sure that the rotors are perfectly aligned or tilted in the way that yaw control is increased. If a motor is tilted in the wrong direction, this completely ruins the yaw control effectiveness (some more info here: https://www.rcgroups.com/forums/showthread.php?1513148-Tilted-motors-on-a-quad-for-better-yaw)
1 Like
This is my flight yesterday after trying to recalibrate. but the results were not very good, I continued to have no control over yaw and led to the plane losing control and being turned over.
log here: https://logs.px4.io/plot_app?log=7deb1ac5-7019-468b-9994-84bfce1a528e
can you give advice
I calibrated my hexa just like the link you gave, so is the motor in the right direction and direction
Hi @Tan_Ph_m ,
The vehicle is trying to do its maximum to actuate yaw. On the image below you see that three motors (turning on the same direction) are at minimum speed and the three other ones are at high throttle. It’s basically flying on three rotors that spin in the same direction, it’s not possible that it doesn’t yaw except if it has reverse tilt.
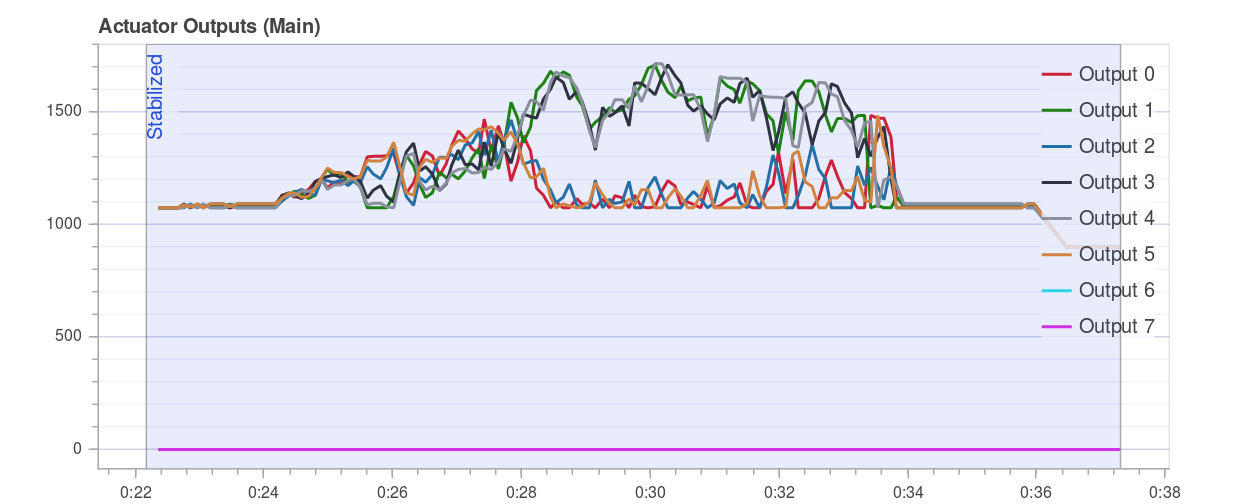
Do you have pictures of your setup?
1 Like
Many thanks for your support.
The biggest reason why I could not yaw that my two motor shaft was misaligned,
After receiving the advice I had calibrated it and now it flew successfully.
But the actual parameters of PIDs are still unstable, the aircraft still vibrates when moving,
PX4 is different from ardupilot it does not have autoturn
So how do my planes work more stably, thank you very much
I’m glad the yaw issue is fixed now. For rate controller PID tuning, please refer to the following guide: https://docs.px4.io/en/config_mc/pid_tuning_guide_multicopter.html .
We’re working on autotuning but the feature isn’t available yet.
Good luck!
Hope you will soon have the function of auto turn like ardupilot, it is very convenient for amateurs. Many thanks for the help