Hello,
I am experiencing some issues with accelerometers and vibration. I am using a Pixhawk6C on a quad. When I was using ArduPilot, the flight performance was excellent. However, after switching to PX4, I encountered significant flight vibrations.
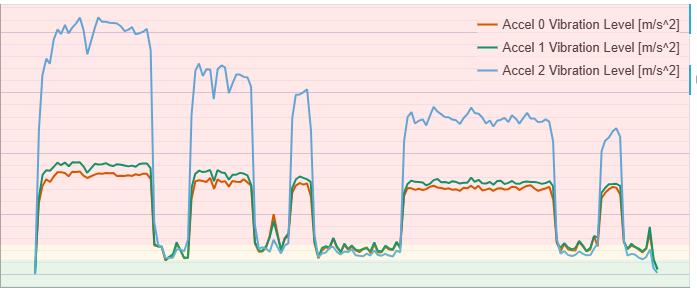
Here are the logs and vibration graphs:
https://logs.px4.io/plot_app?log=076fbf64-c1e0-46db-a746-ee0ef385ab01
I identified that the issue was resonance caused by the damping pad by examining the logs. So, I removed the pad. The flight performance improved, but the vibration levels in the flight logs remained bad. Additionally, when I attempted to fly using an onboard computer later, the vibration levels were incredibly high, leading to a crash. I also occasionally experienced clips during flight testing.
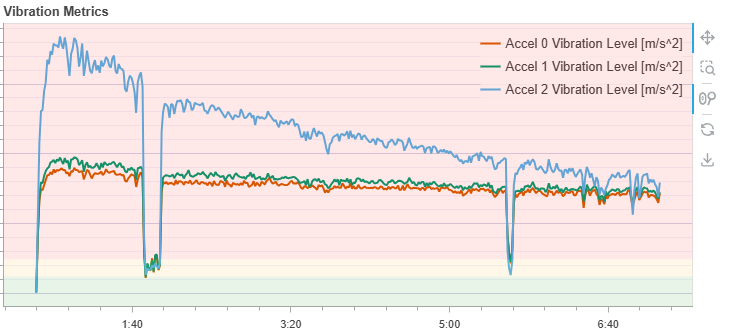
Here are the vibration graphs and logs for RC-controlled flights:
https://logs.px4.io/plot_app?log=dfcf7072-5a96-4c13-9fc2-f4fd22efb1ff

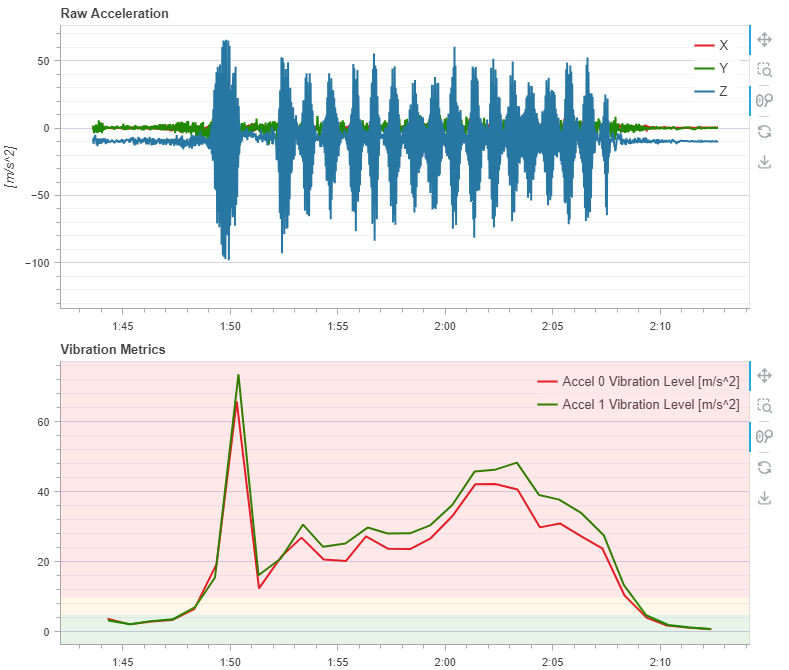
And here are the ones for onboard computer flights:
https://logs.px4.io/plot_app?log=4afed8e7-f766-48c9-afe4-5cf8266ea246

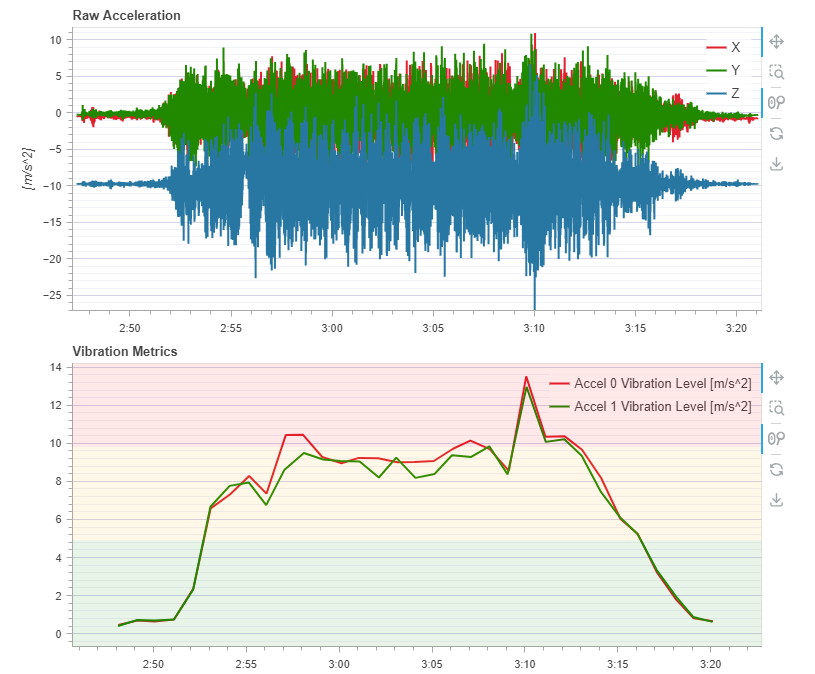
I later tried adjusting IMU_DGYRO_CUTOFF to 15 and IMU_GYRO_CUTOFF to 30, which significantly improved the flight conditions, but the vibration levels are still high. I am unsure how to further improve the situation.
https://logs.px4.io/plot_app?log=307c3123-c907-49cd-93b9-9a23d0565223
The drone’s structure is very simple, consisting only of motors, ESCs, a power distribution board, GPS, an RC receiver, a laser rangefinder, and the Pixhawk6C, all tightly secured. The Pixhawk6C is mounted on the frame using foam padding.

I believe it’s a hardware structure issue, but I am not sure how to address it. Any advice would be greatly appreciated.
Thanks.