I bought an Pixhawk from Banggood (link below), flashing the board via MissionPlanner works normally, also the board acts like everything is right. But if I connect a Servo or an ESC there is no respone. I then connected an oscilloscope and there is no PWM Signal. I then tried to flash older firmwares, at one point I got a correct PWM Signal, but when I rebooted it, the signal was gone agaon on all outputs.
Can it be that there is a firmware issue, or is it more likly that the board is funky?
Sounds like the safety switch is enabled (it is by default). If it’s fitted, pressing it will allow the output signals. If it’s not, you can disable the parameter (brd_safety_enable in missionplanner, use the full parameter list and search for it).
Thanks for your answer!!
I force armed it via MissionPlanner, that should overrite the safetyswitch, or am I wrong?
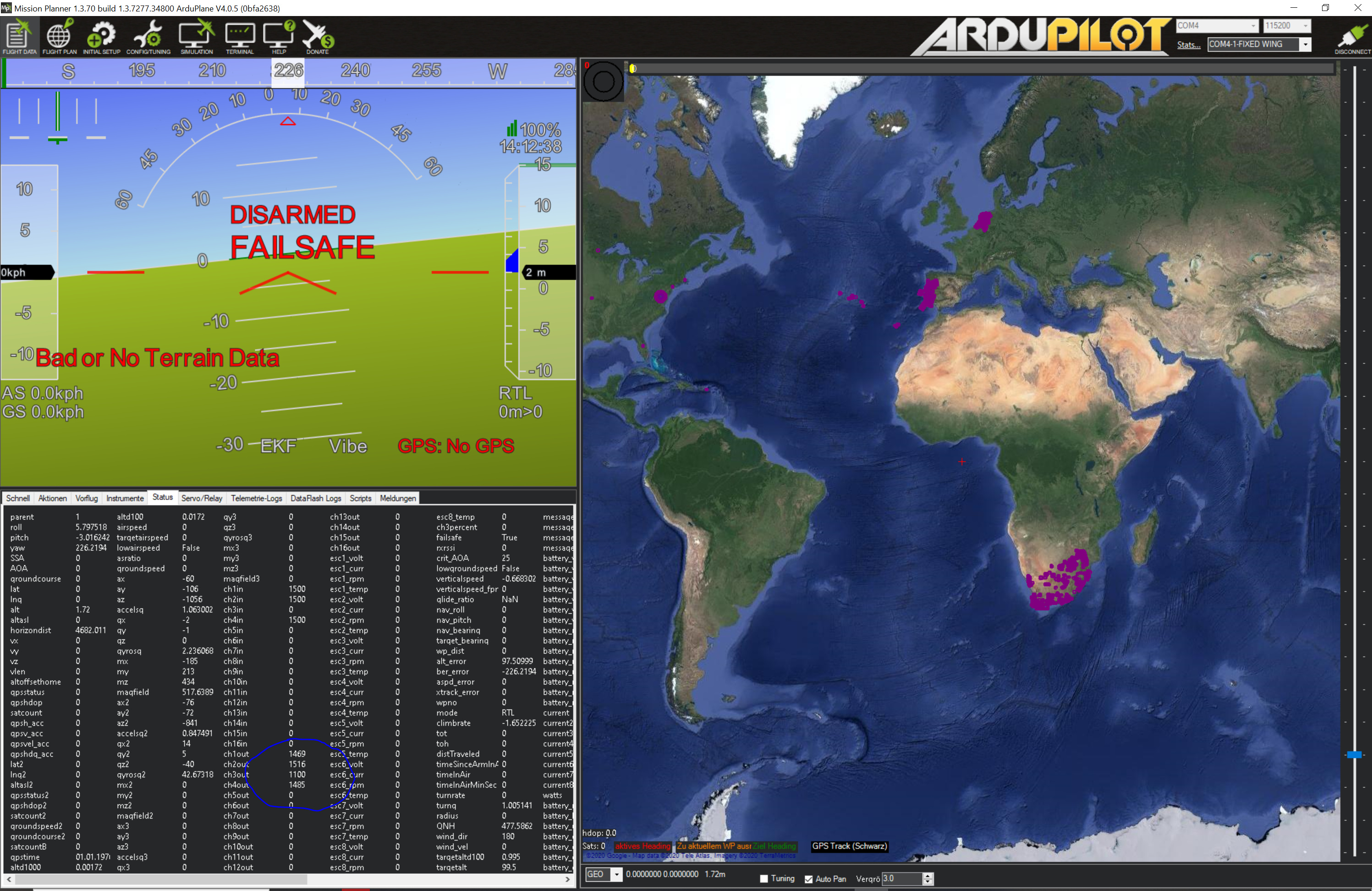
I also saw on the status page in missionplanner a value at output 1-4 and when I toggeld for example output 5, the value on that output became also active, but no PWM Signal at any output could be measured.
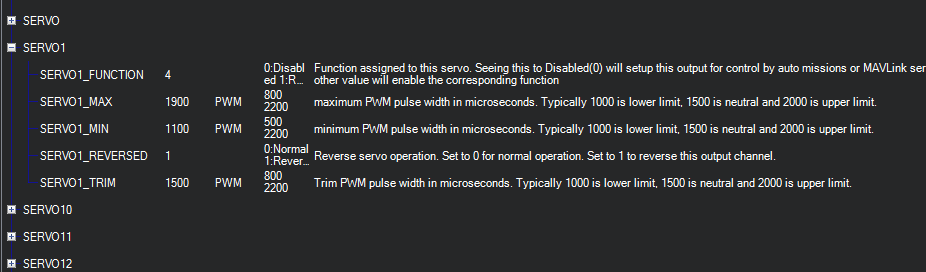
have you confirmed that all your min, max, disarmed, failsafe values are sensible in the parameters? I found all my values were at -1 at the beginning and as a result there was no pwm on any ch output pins, armed or not, until i ranged them to 1000-2000us etc.
On the status page the Outputs 1-4 seem to output always a signal in the range from 1000-2000 (if armed or not), all 1500 and the throttle ouptut 1100 as I think they all should. If I toggle for example the output 5, the output signal on the status page goes from 0 to the correct value between 1000-2000, but I can not measure a PWM Signal on the output. I changed no settigs, alle default settings from ArduPlane V4.0.5. I didn’t connect anything only a receiver via the RCIN, So there are the usual warnings like no GPS and bad Compass health. I also tried it with everything connceted in the plane, but that didn’t change anything.
The status page data is pre- the min max limits. I also had status page showing data but made no difference, in my case the min and max for all channels were -1us which prevents any output.