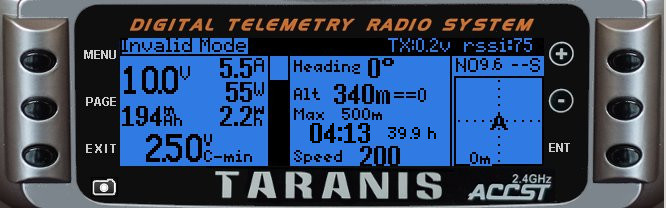
on Arducopter I loved this Teensy MavLink Telemetry Solution for FrSky Taranis:
Since PX4 uses the MavLink Protocol as well, in theory the same solution should work for the PX4 flightstack as well. But unfortunatly it does not work.
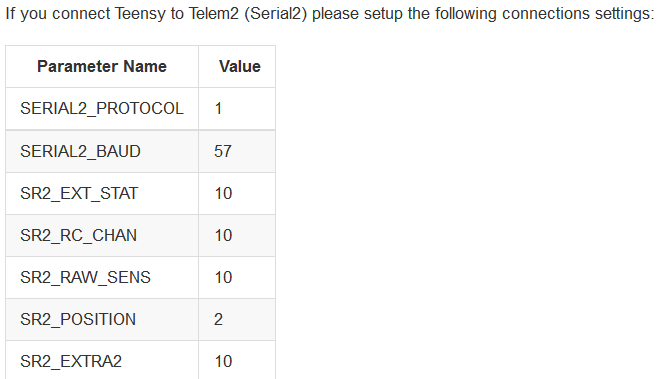
I believe this is because the Telemetry-Port has to be “configured” in the right way. For Arducopter the settings are depicted here: Home · Clooney82/MavLink_FrSkySPort Wiki · GitHub
Can someone please tell me how to configure that for PX4?
Can I use QGC to configure both Telem-Ports on the Pixracer?
I know that Pixracer has a dedicated FrSky Interface but it only provides a very limited number of interesting telemetry data values whereas this solution reads about 21 sensors/values.
@LorenzMeier : Would be fantastic if PX4 would support this directly (probably even without Teensy). However you have to consider that the “Sensor names” have to match each other:
So far this is the most advanced Telemetry solution for Taranis yet. Using it is really really convenient and fun. I would hate to have to go back and flash Arducopter again in order to use it.
Thanks!
@LorenzMeier: In the meanwhile - Is there a way to configure the TELEM1 or 2 -Port on PX4 accordingly to the desired settings like in Arducopter? Since both speak “MavLink” this must somehow work.
Thank you for complementing the documentation. Unfortunatly it did not help.
As far as I understood these settings affect the TL2 Port on the Pixracer board only (TL1 unaffected).
I tried all 5 settings without success. As far as I understand the Teensy initially polls the flightcontroller to send specific parameters via MavLink. I can see this initial request via the LED briefly lighting up on the Teensy. Then nothing happens anymore.
Connected to a Pixhawk v2 with AC3.3 the request of the Teensy is followed by the LED rapidly flashing, indicatng that it receives data. Somehow this “handshake” seems to fail on PX4
Furthermore we developed a Raspberry based All-in-One WiFi solution (realtime HD Video and OSD downlink + MavLink Command Uplink). Works flawlessly using a Pixhawk with AC3.3 and these settings:
SERIAL2_PROTOCOL 1
SERIAL2_BAUD 57
SR2_EXT_STAT 2
SR2_EXTRA1 8
SR2_EXTRA2 2
SR2_EXTRA3 0
SR2_PARAMS 2
SR2_POSITION 2
SR2_RAW_CRTL 0
SR2_RAW_SENS 0
SR2_RC_CHAN 0
OSD and MavLink Control Uplink do not work at all with PX4 yet - regardless which of the 5 presets we tried.
Correct cabling and connections have been double checked already.
Wouldn’t it make sense to implement a 100% Arducopter compatible/identical way to configure the serial Ports for PX4?
There are tons of MavLink peripherals out there which need very specific parameters and settings in order to work properly. I am not sure if one can give good coverage for all those solutions with 5 presets?
Many Thanks for the excellent Support and Help in Advance!
I flashed my auav-x2, witch has a full functioning teensy system with the px4 firmware and the telemetry still work perfectly. Only downside is that the lua script is for apm so I don’t get the flightmode back to my taranis from the fc. But everything else (bat, gps, hdop, etc…) is displayed on my taranis.
I don’t know on the pixracer, but with the Firmware it worksfine!
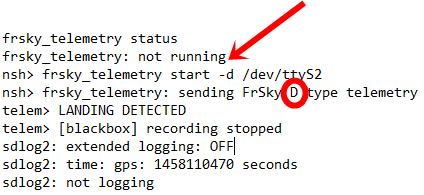
On a normal pixhawk the telemetry for X-Type Receiver does not work also:
After booting, the app is not running.
Started manually a D-type receiver is detected, although a X8 receiver is connected.
SYS_COMPANION is set to Telemetry. With APM firmware hardeware works perfectly.
Can anyone tell me where this has been left off? I have a prototype I need to build using this PixRacer if possible. I need to run Crossfire (900mhz) and 2.4g video. I need to have video (using ezcap) and telemetry sent back to Mission planner (using Bluetooth on Crossfire). Is this all possible with the Pix Racer or should I movbe up to PixHawk? Its needed to be in a small platform.
Meanwhile i use arduplane firmware instead of px4-stack for a long time. With arduplane Mavlink via Crossfire works as well as Frsky telemetry on Pixracer. Since I have no 2.4GHZ Crossfire FPV equipment, I can not comment on that.


 tly.
tly.