Hi all,
I’m stuck on my first build and looking for help. Apologies if this isn’t the right category.
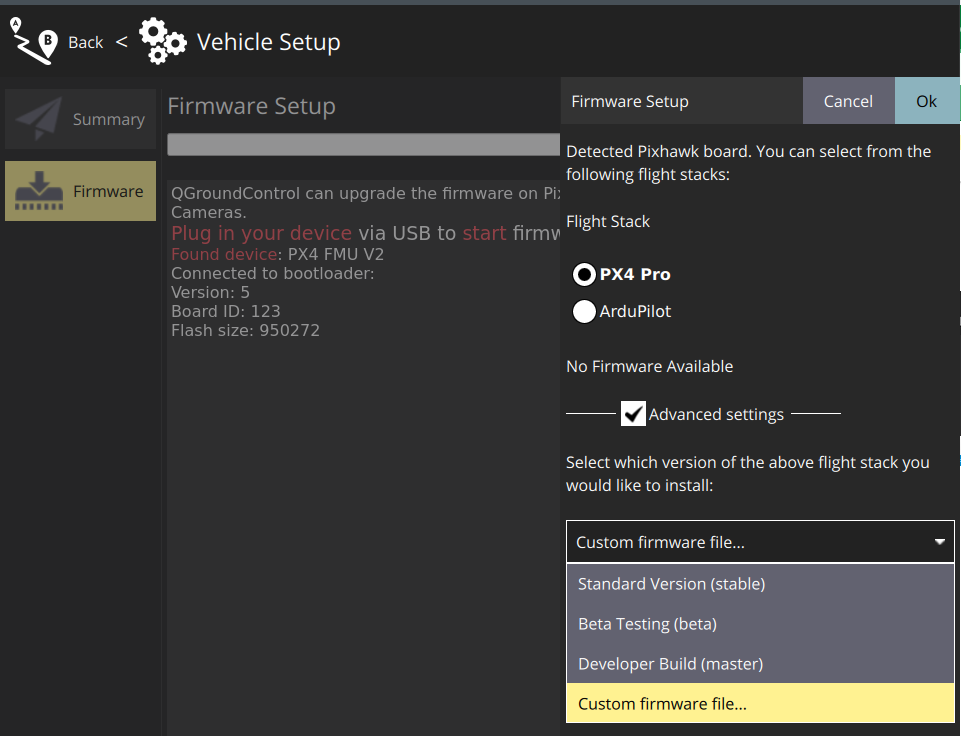
I have a Pixhawk 6c running PX4. I’ve soldered a Radiomaster RP2 ELRS receiver via port TELEM2 (because I read that the UART5 is capable of handling that communication) (TX to RX, RX to TX)
The RP2 lights up and I can get it in binding mode (2 pulsing lights). I have the RP2 unflashed/factory flashed. I can’t get it to bind with my TX12 MK2. I click on “bind” in the ELRS tool on the transmitter, however it doesn’t bind (i.e. the RP2 receiver doesn’t turn “solid green”). The Bind tool on TX12 just says “binding” and then exits after a few seconds. The RP2 remains in binding mode (double green flash) and after reboot goes to “wifi mode” (fast continuous blink)
My TX12 runs EDGETX 2.8.4
RP2 out of the box… 1.5 something (lost the sticker ![]() )
)
I’ve done a lot of searching but feel stuck enough to ask for help here.
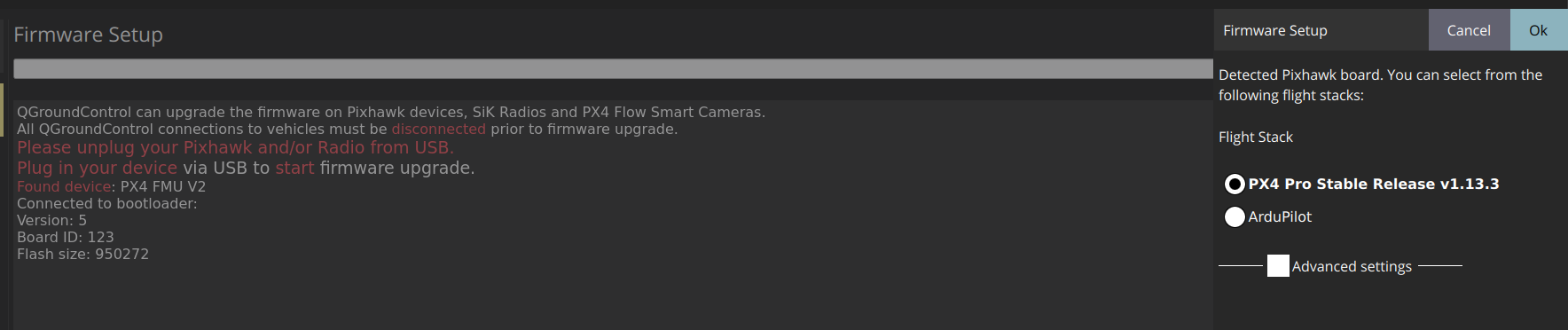
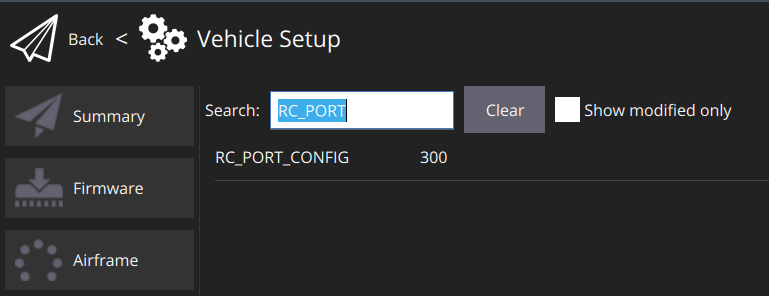
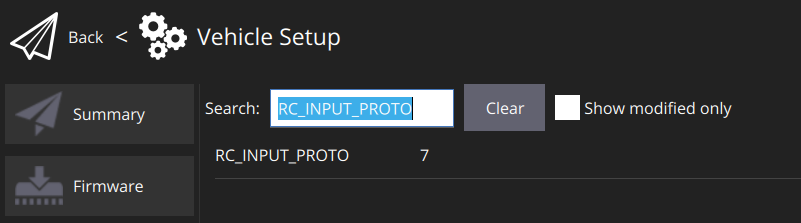
I reckon I have to tell PX4 that TELEM2 is connected to the RC receiver and “something with CSRF”, however I’ve come across some posts that this is possible in Ardu but not in PX4.
So far I’ve used the following tutorials:

")
Thanks in advance!