There are many questions about the unavailability of MSP_OSD. I had same
Hi everyone,
I’m trying to set up the DJI O3 Air Unit with OSD on PX4. I’ve flashed version 1.15 with MSP_OSD enabled and connected the DJI O3 Air Unit to TELEM1. However, I’m only seeing the main battery voltage displayed on the OSD—no other telemetry data appears.
Interestingly, when I tested the same setup with a Caddx Vista, the OSD works as expected, showing all relevant telemetry data.
Does anyone have experience with the DJI O3 Air Unit and PX4 MSP_OSD? Is there a specific configuratio…
Greeting!
I’ve just successfully used ELRS-MAVLink for telemetry. It’s quite simple MAVLink - ExpressLRS can be helpful.
Note that both the Tx and Rx should be running ELRS version >3.5. After updating, you can simply modify a few parameters of PX4 in QGC, and everything should work.
Good luck!
I’m also looking for solutions for OSD because I couldn’t get my Avatar HD to work with PX4 (no OSD information on the screen, although the msp_osd status seems fine).
After some research and code reading, I found that the MSP_OSD rendering process of PX4 is very different from the latest Betaflight and Ardupilot
The message function filed( message[4] ) in betaflight and ardupilot are all B6(182)
// External OSD displayport mode messages
#define MSP_DISPLAYPORT 182
But this filed PX4 every one is different
[image]
I have analyzed the MSPOSD drawing process of the latest betalight.
[image]
If you want to draw the pitch in OSD, such like in the picture above.
The complete data flow is as below. it’s base on subcmd in the message[5].
24 4D 3E 01 B6 00 B7 // Release the display a…
After comparing the Betaflight and OpenIPC MSPOSD code, I modified the code of PX4 MSP_OSD, and the OSD now can be rendered.
The current code are only examples and have not been completed. Full support may take some time.
My testing equipment is OpenIPC and O3/O4 Air unit.
Thanks for looking into this. If you get it fixed up and working can you submit a PR?
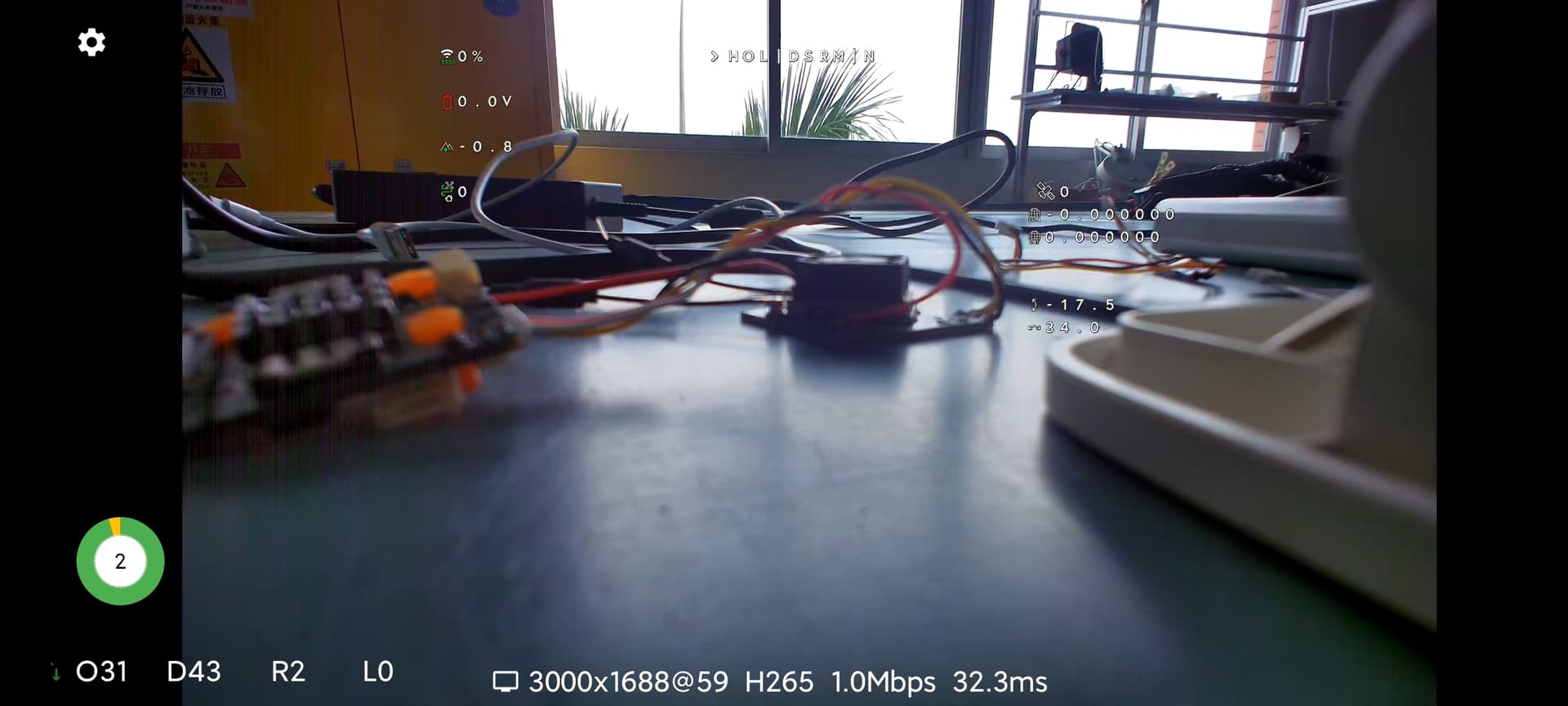
Tested on DJI O3 Airunit and it’s OK (2025-04-07)
I have completed the modification of MSPOSD function
The current OSD can already cover a lot usage scenarios. So, I have opened PR.
main ← Li-Tianming:v1.15.4-br_osd_mod
opened 06:48AM - 09 Apr 25 UTC
### Add MSP_OSD support for DJI O3/O4 and OpenIPC OSD rendering
There are lot … issue about the not working of MSP_OSD module for DJI O3 and Walksnail. I had same
problems.
https://discuss.px4.io/t/msp-osd-support-for-walksnail-vtx-and-avatar-goggles/40134
This PX4 forum topic (https://discuss.px4.io/t/msp-osd-code-changes-to-support-openipc-dji-o3-and-other-digital-vtx-osd/44723) list all links that mention this issue
### Solution
- Change Message content which same as lasted Betaflight and Ardupilot.
- Change Message flow which same as lasted Betaflight and Ardupilot.
### Changelog Entry
For release notes:
```
```
### Alternatives
### Test coverage
- Unit/integration test: ...
- Simulation/hardware testing logs:
### Context
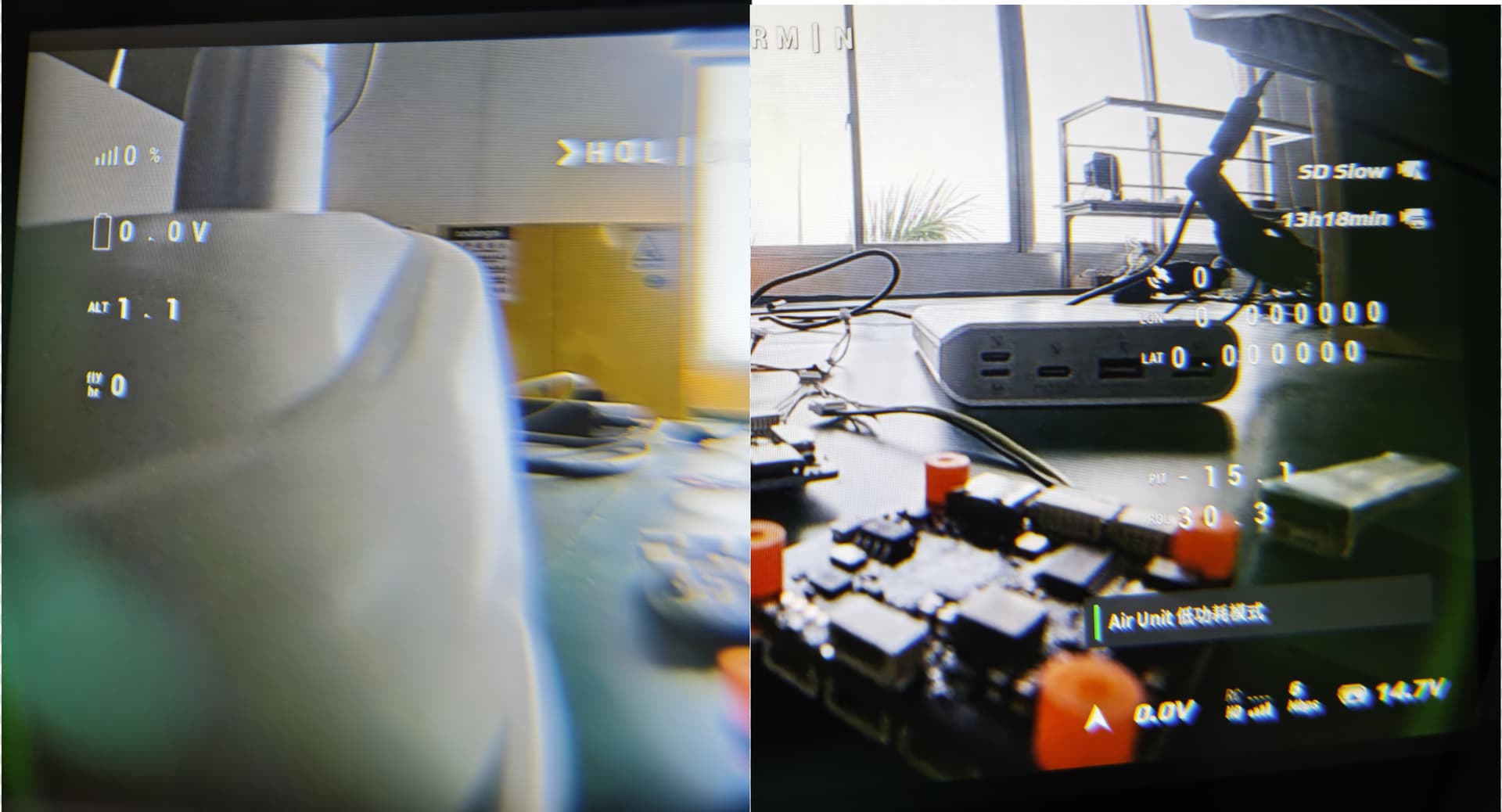
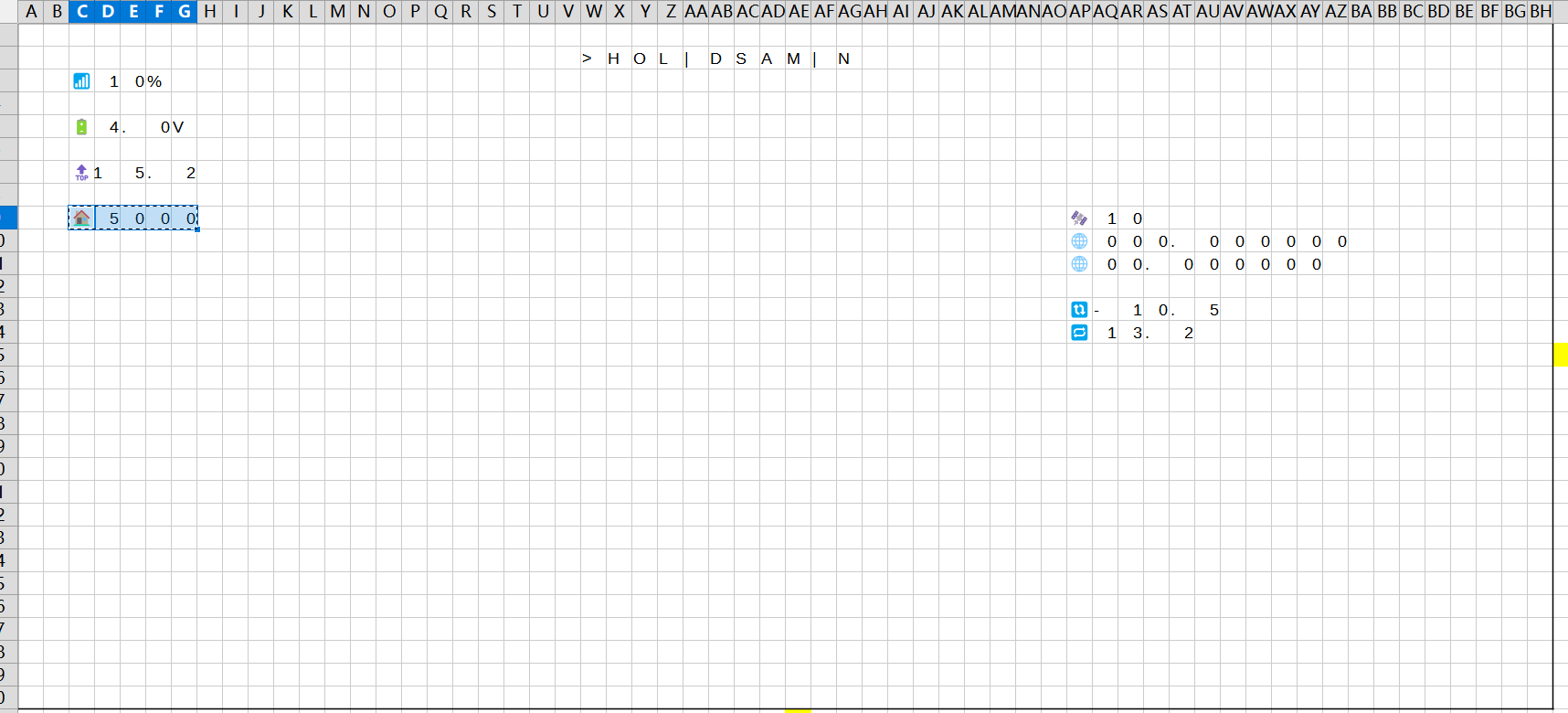
This is the final osd display result
OpenIPC Pixelpilot

DJI O3 goggles

For layout

Awesome thank you! I will check it out
alnI3S
April 9, 2025, 8:13am
7
Thank you very much @Li-Tianming ,
You did a nice work for the community.
I’m also working by porting Audupilot msp osd to PX4 by creating a new protocol for osd devices instead of modifying the existing PX4 code. There are 107 osd symbols instead of 22 for PX4 for now. Your work help me to simplify the porting.
Thanks again
Thanks @Li-Tianming ! This is an issue I’ve been waiting to see updated.
Still having issues after building the main branch. (Reference related bug for setup details: Recording PX4 MSP OSD · Issue #143 · fpv-wtf/msp-osd · GitHub ) .
Seems like your issue is unrelated to the driver as it does run but communication with the VTX doesn’t work (or it works but VTX is not configured, idk).