You can use all the modes PX4 supports with the Convergence, therefore also stabilization. If you mean “Loiter” as in “GPS assisted” flight, that is called Position Control in PX4 (and is of course also available).
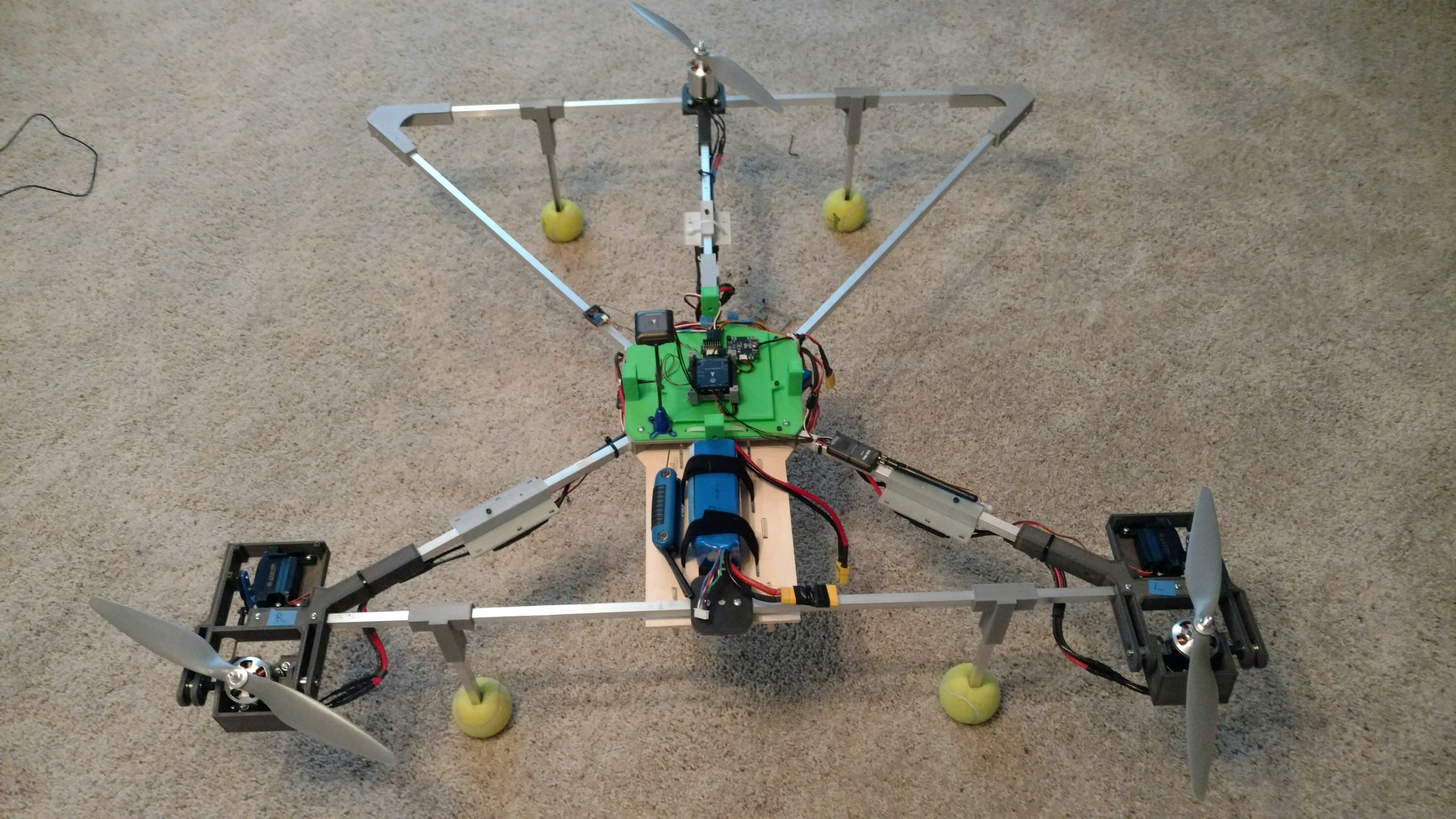
2 questions using the Convergence firmware. I have 2 PixFalcons configured. The first one works as expected and hovers nicely. The second one not yet. The first question is what parameter controls the motor idle on arming? My first PixFalcon does not turn the motors on which is what I prefer. The second one starts up after arming. The second question is the biggest issue. I’ve recalibrated several times. As it begins lifting, it yaws right. I have moved the GPS/Compass to be above the frame as far as the cable allows. That did not change anything. In hover mode, the rudder works the exact opposite from my first PixFalcon. With right rudder, the right motor tilts forward. And with left rudder the left motor tilts forward. Aileron and elevator seem to work the same as my first one. The orientation for the second one is “0” rotation. It sets with label side up facing the front. Maybe the picture will help for what I’m missing.
Idle setting for VTOL for multirotor engines: VT_IDLE_PWM_MC. For your second issue, please post the link to a log file of your tests. Do I assume correctly that you are just swapping the PixFalcon on the same airframe? Regarding the reversing, check the PWM_ and RC_ parameters and verify that they are the same on both autopilots.
Thanks for the IDLE setting. One of my PixFalcons is in the Convergence airframe. The other is in the one pictured above. After going thru the wiring maze, I discovered what is causing the rudder confusion. I had forgotten that during the assembly of this frame and getting tilt servos to move in the correct direction, I switched P5 and P6 around. This made the servos move the correct direction when I flipped the tilt switch. But determined that now it has caused my current rudder problem. With P5 and P6 in their correct port, the tilt orientation is backwards. Is there a parameter or other setting that will reverse the tilt direction that won’t cause grief somewhere else? Thanks.
I’m new to the log file aspect. The only log file I can find is a TLOG type that gets created when I disconnect QGC. The link to this file is: https://www.dropbox.com/s/exilxhozp9wy0lw/2017-06-14%2020-33-45.tlog?dl=0
To add to the above, with P5 and P6 in the correct port, when in hover mode, motors are tilted forward. The throttle controls all 3 motors. When in normal mode, motors are tilted up and the throttle controls 2 motors.
I have worked out the reversing issue (I hope), using VT_Tilt_FW = 0 and VT_Tilt_MC=1. But, I still have the yaw right on liftoff issue. And the motor tilting with rudder being backwards from the Convergence airframe. Here is the latest TLOG file. The older one was deleted. https://www.dropbox.com/s/jj8jt6j1btg8agw/2017-06-16%2008-37-43.tlog?dl=0
The logs are on the SD card in the “log” folder. If you have .ulg extensions please upload them here: http://review.px4.io/, if you have .px4log extensions, please upload here: http://logs.uaventure.com/.
In both cases you can then share the link here.
Instead of reversing with VT_Tilt_FW = 0 and VT_Tilt_MC=1 you can reverse the PWM channels like this:
PWM_MAIN_REV5: 1
PWM_MAIN_REV6: 1
This should fix the hover/forwards position and the reversed yaw. (Remember to set VT_Tilt_FW = 0 and VT_Tilt_MC=1 back to the values before).
1 Like
Andreas, you are awesome!! reversing the PWM channels fixed the yaw hover/forwards issues. This is great progress. Thanks. Now, on lift off, the rear motor does not seem to be providing the thrust to keep it level. I do know that pitch control does seem to work correctly. In this frame all motors and props are the same. I’ve attempted to upload a .ulg file. In QGC the log download always says “timed out”. I don’t know if anything is in it or not. Here’s the link. http://review.px4.io/plot_app?log=555a4f51-f0fa-4873-96cd-3e987768807e
Rear motor thrust is OK. I hope to do my first outdoor “real” hover test this evening and will provide a log file.
Here is the log file. http://review.px4.io/plot_app?log=c1d71528-338d-4204-a7b4-dceb06b51743 for the first hover test. It is short and was very windy.
Perhaps a newbie question: how is the power distribution board connected? It is not very obvious from the picture in the build log.
Right now I have configured everything in the firmware but nothing moves when I arm it. I am using the 3DR 10S power module with 3S battery, but the other end is not connected since I do not have anything to connect it to. Maybe the pdb should have been there?

@ldsanders2807 great, looks like a successful outdoor test!
@yutaoliu which flight controller are you using? The power distribution board needs to supply power to all 3 ESCs and the BEC for the servos.
I am using the 3DR Pixhawk Mini, trying to modify the pdb that came with it. The convergence has some unconventional ESCs and I am not sure which cables to use.
The white line contains the 400Hz pwm pulse towards the esc.
There is no bec in the escs !!
Black is ground and red comes from the + lipo battery / current sensor.
The servo rail has to be powered with an additional 5 V supply
Currently I´m trying Pixracer for the Convergence Vtol.
Transitions re manual done by an external x-fade-mixer via rc aux
Then airplane mode is controlled by a second / third flight controller that currently flies perfect for fun and aerobatic stunt flying.
PixRacer needs only control the 3 esc and 2 tilt servos using percentage of tilt for hovering forward and differential tilt for yaw.
Especially for windy environment this flight mode is absolutely essential.
Hovering forward with conventional pitch control (nose down) doesn´t make sense when tilt-rotor-functionality is available.
I´ve connected servos and was not able to get tilt percentage controlled by rc pitch (like the Eflite controller does)
For rtl / failsafe and missions, full transitions are not really necessary for me
1 Like
… for full vector thrust and full differential yaw the two Convergence tilt servos need a pwm range of about 650us to 2345us
Is there a trick to come above 2150us ?
even with pwm setting of 2200us pixhawk outputs not above 2150us
And after restart all pwm limits are reseted again to 1000/2000us
“param save” does not change the defaults
I agree with you that it would be nice to have a smooth conversion from copter to airplane mode with any tilt position between the two modes. Flying fotrward with nose down is not a clever solution. At my house I only have a small field to fly and airplane mode is too fast for the size. I would like to fly in a variable intermediate mode with a little help from the rear propeller and active ailerons. In between I solved the problem by not using the airplane mode. I did set the tilt to 70 instead of 90 degrees up. This results in a hanging Tail while hovering but when the forward stick is moved the tail comes up.
Thanks for the information! Will try to look into the wiring again and also do ESC calibration.
Hallo Andreas,ich schreibe in deutsch weil englisch nicht so meine ist,deine Programmierung ist der Hammer  nur ist es bei mir so wenn ich in den flugmodus schalte kann ich die querruder nur mit dem yaw stick steuern fliege aber eigentlich Mode 2 also seitenruder auf dem linken stick was muß ich machen wenn ich umschalten das ich die querruder auf den rechten stick bekomme? Danke im voraus und super was du machst
nur ist es bei mir so wenn ich in den flugmodus schalte kann ich die querruder nur mit dem yaw stick steuern fliege aber eigentlich Mode 2 also seitenruder auf dem linken stick was muß ich machen wenn ich umschalten das ich die querruder auf den rechten stick bekomme? Danke im voraus und super was du machst
Thomas