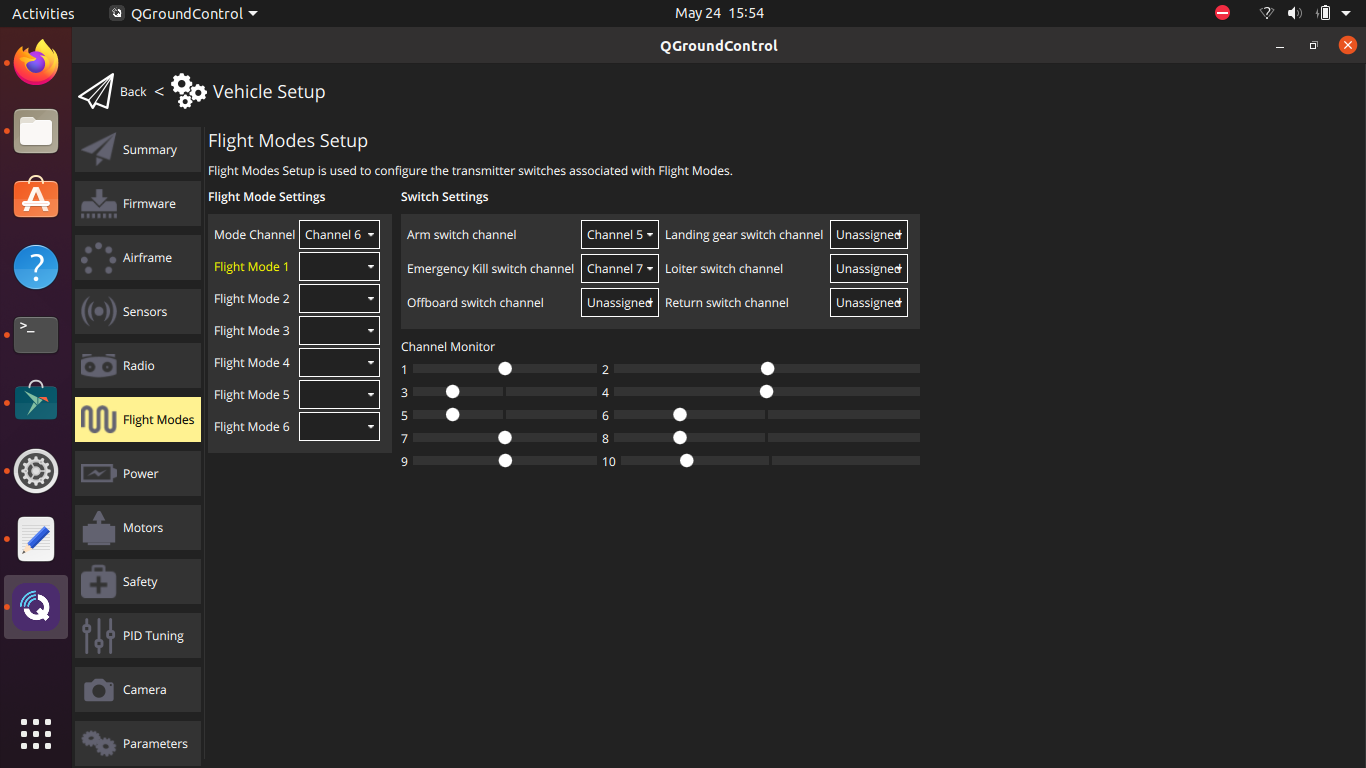
I am having a strange issue where my flight modes are blank in QGroundControl and I am unable to populate them. On an old laptop, I was able to set different flight modes for my PX4 drone including position control, offboard mode, etc. For some reason I can’t do any of this on my new laptop. I’ve uninstalled and reinstalled QGroundControl twice to no avail. I’ve attached a relevant screenshot. Anyone experienced similar issues?
Try installing newer firmware or maybe the firmware version you were using on an old laptop.
You can always change mode with parameters, COM_FLTMODE2 and so one. Try using it. Flip the channel six on RC and check whether a mode is changing or not.
Flipping my channel 6 switch does indeed cause flight modes to alternate between manual, position, and offboard flight modes, though I am having a hard time altering these flight modes without the GUI working. Is COM_FLTMODE2 a QGroundControl feature or is that part of a command I should use in the terminal?
I believe both Laptops are using the same version of Linux, Ubuntu 20.04. That’s a good thing to be double-sure of so I will reach out and check with the old laptop’s user.
John, were you able to resolve this? I am having an identical issue and I can’t for the life of me figure it out. I am not seeing the COM_FLTMODE2 anywhere in the parameters section in vehicle setup
I’m having the same issue with my 3dr Pixhawk on Qgroundcontrol running firmware px4 v1.14 on Windows 10 pc. I have flight modes set to channel 5, but the switchable modes are not populating. The drop downs are blank.
Just to try it, I updated the firmware to beta v1.15, and the flight mode options are now there and assignable, but now my GPS will not work. There has to be a simpler way to get everything working.
Side note. Also, I’m having an issue with “No cpu load info,” regardless of what firmware I"m running.
Hi everyone, I’m new here and I have the same problem. Has anyone managed to solve it on Windows OS? I have a Px4 and QGC on Windows 10 Home 22H2 OS. I can’t fly, the drone arms for a few seconds and then disarms. Thanks to anyone who can help me.
In case that someone still has a problem related to this, the reason could be the mismatch version of the PX4 version and the QGround version. Like earlier I used the pretty old one firmware, v1.11.0 with the latest QGround, v4.4.4, the drop down is blank and when I check the parameters like mavlink parameters, I couldn’t set it be like “TELEM1”, but with number instead (by default it is “1”) which of course not user friendly. But then, when I change the version of the QGround back to v4.0.11, everything showed as expected. No more blank flight modes.