Overview
During a recent experiment with the model “Sky Fury,” a VTOL using PX4, in fixed-wing Mission mode, while we were guiding it toward an appropriate waypoint, the roll rate suddenly became constant at 9 deg/s and remained unchanged until the roll angle reached 80 degrees. The system did not switch to multicopter mode, and the aircraft disintegrated in midair and crashed. We would appreciate any insights or suggestions to help resolve this issue.
Test Specifications
-
Model: Sky Fury
-
Configuration: Standard VTOL
-
Controller: CubePilot Cube Orange+
-
Firmware: PX4 v1.15.2 (self-compiled with adding
vehicle_commandandmission_resulttopics indds_topics.yaml) -
Computer OS: Ubuntu 20.04
-
ROS Version: ROS2 Foxy
Crash Process
When we noticed an anomaly during the offboard experiment (the roll angle remained excessively large), we switched the VTOL from offboard mode to mission mode and guided it toward the next waypoint. This waypoint was more than 1 km ahead of the aircraft and did not require any large maneuvers. However, at that moment, the roll rate suddenly became constant at 9 deg/s and remained unchanged until the roll angle reached 80 degrees. Although an excessive-attitude protection was triggered, the system did not switch to multicopter mode. As the excessive roll caused a loss of lift, the aircraft began to fall, during which the left wing disintegrated, and the VTOL subsequently crashed.
Here are the ulog analysis, QGC recording, and flight video. We hope these materials can provide some clues.
Ulog analysis
QGC recording
QGC Record about E13Crash at Oct.20 2025 1429 (The anomaly occurred after 3 minutes and 30 seconds.)
Fight video
Flight Video about E13Crash at Oct.20 2025 1429 (The anomaly occurred after 3 minutes and 30 seconds.)
Crash analysis
- First, the flight video shows that the wings exhibited vertical oscillations relative to the fuselage.
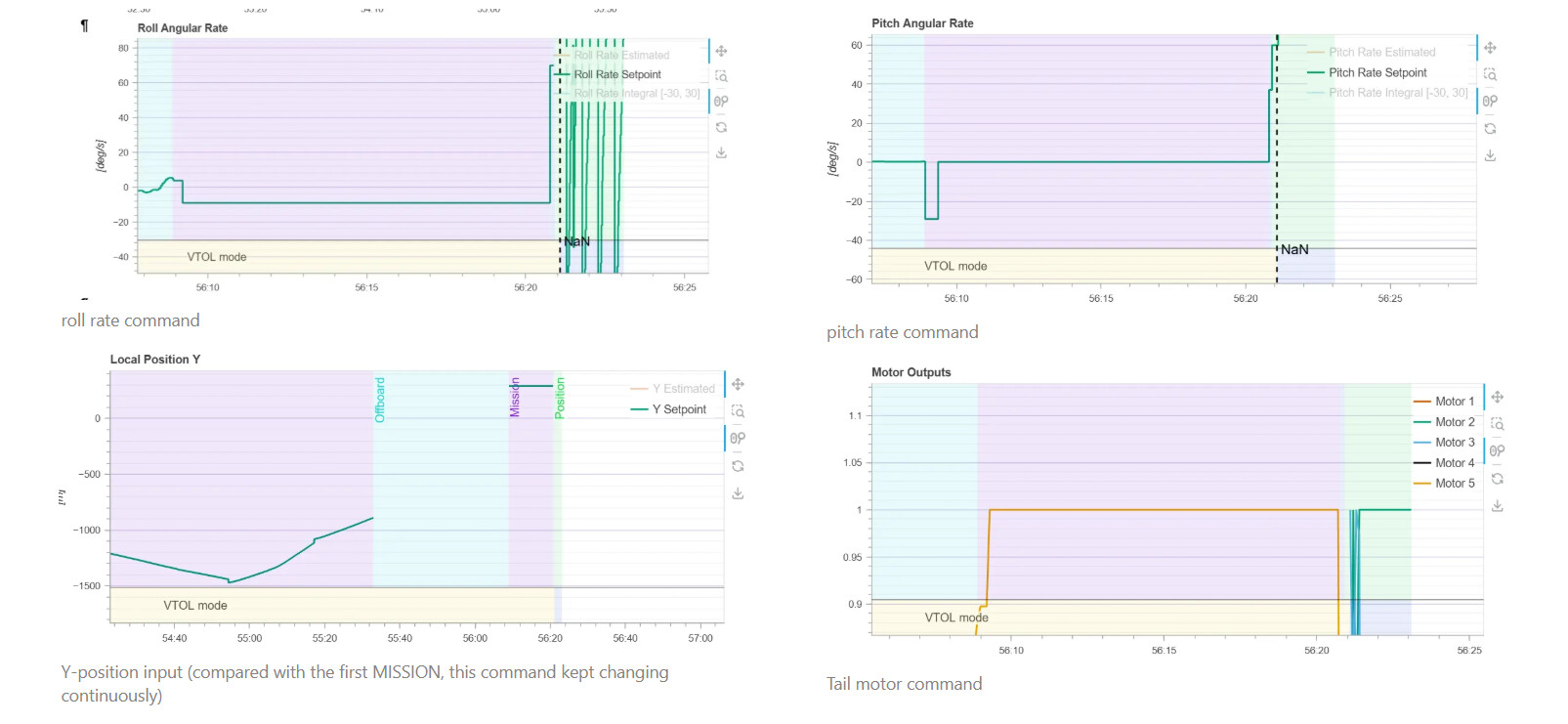
- The attitude rate command from the flight controller remained completely unchanged, causing the aircraft’s roll angle to increase rapidly.
- The tail thrust and position coordinate inputs also remained constant.
The right wing after the damage

The left wing after separation

- A wing damaged by physical impact would typically be torn into irregular fracture surfaces by the metal connectors, with wing debris remaining attached to those connectors.
- In contrast, the fracture on the left wing’s metal connector is relatively smooth and regular, with four screw holes clearly visible. Therefore, it is inferred that the connection between the left wing and its metal connector was not secure.
Confusion
-
Why did command anomalies occur during the second entry into Mission mode?
-
Why didn’t the aircraft switch to multicopter (VTOL) protection mode?
-
Was the left wing separation caused by the large roll maneuver or by a pre-existing poor connection?
-
If the left wing had a poor connection beforehand, could that have caused abnormal flight controller commands?
