I’m experiencing a critical issue with a fixed-wing aircraft running PX4 firmware v1.16.0. During flight testing, an abnormal failure occurred:
For the first 16 seconds, motor control functioned normally. Suddenly, the motor power began rapidly oscillating between 100% and approximately 20%. This caused uncommanded left roll followed by immediate loss of control and crash.
Notable context:
- The flight controller has prior water damage history
- For graph clarity: Motor PWM output values are multiplied by 10 in the charts
Attached data:
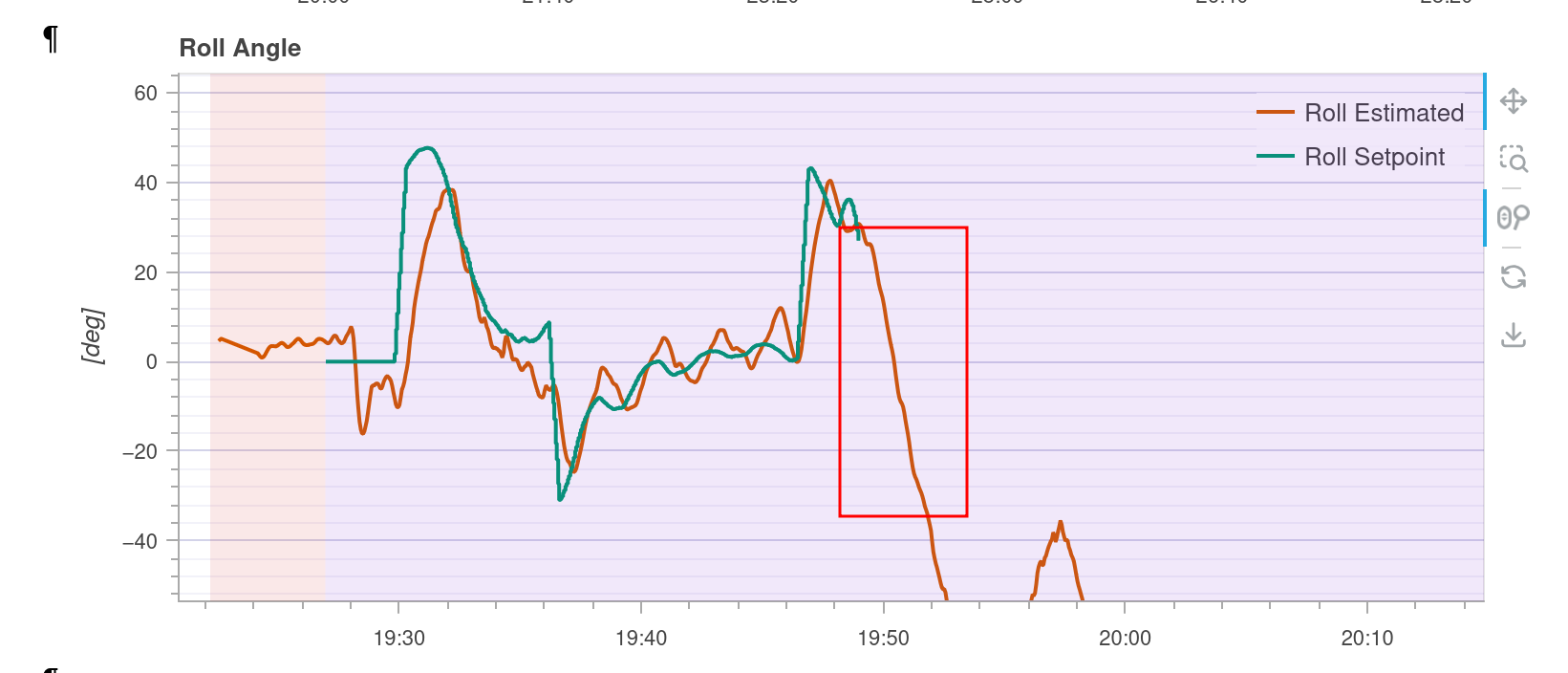
Fig 1: Flight log showing failure
Fig 2: Normal flight reference
Requesting assistance diagnosing this dangerous power oscillation behavior. Full logs available upon request.
Chinese discussion without translation belows.下面是未经翻译的中文描述。
我使用1.16.0版本的PX4固件固定翼飞机。我在试飞时出现了奇怪的故障。在前16秒,马达的功率控制一切正常。但是突然马达的功率在百分之百和20%之间快速跳动。飞机异常地的向左滚转,然后很快就坠毁。值得注意的是,我使用的飞控曾经进水。为了方便阅读,图表中马达的pwm输出值被乘十。
图一是发生故障的飞行记录
图二是一次正常的飞行。
我十分渴望得到您的解答!感谢!
Can you share a log uploaded to logs.px4.io?
https://review.px4.io/plot_app?log=c46c5d55-8e44-4d42-ae83-e9d528b4679c.
In fact, just before replying to your message, I experienced a similar crash. The aircraft had successfully completed 5 laps along the preset route under normal conditions. During the hand-launch for the sixth flight (using the exact same technique as the previous five), the plane failed to pull up promptly, collided with the ground, and broke the landing gear.
After repairing the landing gear, I proceeded with the seventh hand-launch. This time, immediately after takeoff, the aircraft rolled rapidly to the left – exactly like the crash described in the original post – before impacting the ground.
I am deeply puzzled by these incidents. Through troubleshooting, I have confirmed that both the motor and electronic speed controller (ESC) are functioning normally. I am completely confused and would greatly appreciate expert advice.
https://review.px4.io/plot_app?log=c46c5d55-8e44-4d42-ae83-e9d528b4679c.
In fact, just before replying to your message, I experienced a similar crash. The aircraft had successfully completed 5 laps along the preset route under normal conditions. During the hand-launch for the sixth flight (using the exact same technique as the previous five), the plane failed to pull up promptly, collided with the ground, and broke the landing gear.
After repairing the landing gear, I proceeded with the seventh hand-launch. This time, immediately after takeoff, the aircraft rolled rapidly to the left – exactly like the crash described in the original post – before impacting the ground.
I am deeply puzzled by these incidents. Through troubleshooting, I have confirmed that both the motor and electronic speed controller (ESC) are functioning normally. I am completely confused and would greatly appreciate expert advice.
What I can see is that the roll setpoint disappears, so is no longer published:
I’m not sure why that happens yet.
@ryanjAA do you have any idea, looking at the log?
Never seen anything like this.
Attitude SP can disable if you violate roll or pitch maxes aka terminate but I don’t see that here.
I guess with the backstory of the autopilot and its damage that’s worth something.
low on stack is a bit early to coincide with something like this.
the interesting thing is twice By the same user. I’d say next step is a new autopilot exactly the same parameters. If still happens we have a real issue. If not it is something hardware level given water damage (which tbh I’m skeptical of now, there’s Something going on).
Will keep looking.