Overview
In our tests recently, model Sky Fury, a VTOL with PX4, performed unexpected and dangerous behaviours after getting out of Offboard mode. A Sky Fury crashed and another Sky Fury turned almost upside down (but finally landed safely by manual controller).
The most weird thing is that, in both flights, weird behaviours of Sky Fury only happened outside of Offboard mode when no scripts were running.
I hope the community could share some thoughts on this. Thanks!
Test Specifications
- Model: Sky Fury
- Configuration: Standard VTOL
- Controller: CubePilot Cube Orange+
- Firmware: PX4 v1.15.2 (self-compiled with adding
vehicle_commandandmission_resulttopics indds_topics.yaml, modifications) - Companion Computer: AmovLab Allspark2-Orin NX
- Computer OS: Ubuntu 20.04
- ROS Version: ROS2 Foxy
Test Procedure
Both of the two flights were supposed to test Switching between Mission Mode and Offboard Mode. The procedure is as the figure below depicts.

Before takeoff, a plan of several waypoints is uploaded through QGroundControl.
The script running on the companion computer:
- starts before takeoff;
- waits until the drone reaches a certain waypoint (#1 for example in the figure);
- sends a signal of switching into Offboard mode;
- controls the drone in body rate / thrust command (0 in roll & pitch & yaw rate, 0.3 in thrust) for 1 second;
- sends a signal of switching back to Mission mode;
- sends a signal of switching into multi-copter (MC) configuration;
- waits for transition into multi-copter configuration to be completed;
- sends a signal of switching into fixed-wing (FW) configuration;
- waits for transition into fixed-wing configuration to be completed;
- exits.
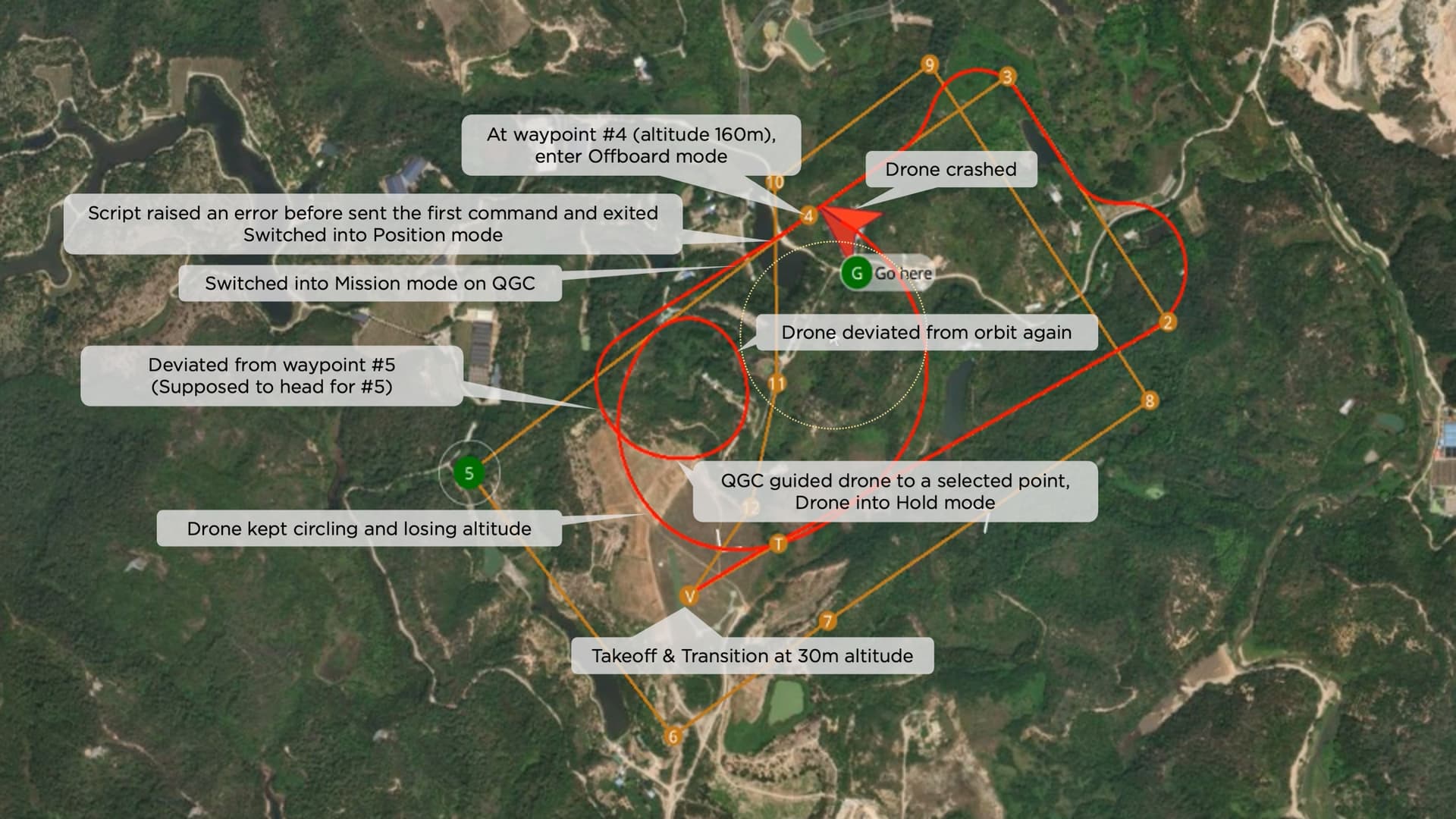
Flight #1
The first attempt of this test caused a crash. After successfully switched into the offboard mode, the script encountered an error and exited. All attempts of guiding the drone to land by QGC failed.
- The drone wouldn’t head for waypoint #5 as it was supposed to after switching back to Mission mode by QGC.
- The drone wouldn’t loiter at the point of QGC’s command.
- The drone was constantly decreasing altitude (but didn’t seem like stall).
Mission Plan

Complete Trajectory
QGC Screen Recording with Onboard Computer

-
Detailed Record
ID for Reference Operation / Behaviour Step of Script Process Timestamp In Video 1-1 The script started Step 1 0:01 1-2 The drone takeoff-ed and followed the mission plan Step 2 0:11 1-3 When the drone reached waypoint #4, the script successfully sent the signal to switch into Offboard mode Step 3 1:56 1-4 The script encountered an error and exited Step 4 1:56 1-5 The drone switched into Position mode immediately 1:57 1-6 QGC controller switched the drone into Mission mode to let it continue the mission 2:10 1-7 The drone didn’t follow the direction of waypoint #5 2:20 1-8 QGC controller selected a point on the map and attempted to guide the drone to loiter around this point 2:30 1-9 The drone switched into Hold mode, and didn’t go for the correct direction; meanwhile, the drone was decreasing altitude and gaining airspeed to more than 30m/s 2:39 1-10 The drone kept flying in a circle with ~300m radius while constantly decreasing altitude 2:55 1-11 The drone crashed 3:28
Confusion
- [1-7] Why the drone didn’t head for waypoint #5?
- [1-8, 1-9] Why the drone didn’t head for the selected point and began to lose altitude?
Flight #2
The second attempt was successful when:
- The script sent the command into Offboard mode.
- Kept sending 0 ypr rate & 0.3 thrust command for 1 second.
- Sent the command back into Mission mode.
- Sent the command of transition to MC.
- Wait for the drone to slow down and finish transition.
- Sent the command of transition to FW.
- Wait for the drone to accelerate and finish transition
Then the pilot took control of the drone just before the transition was completed. ****The operations afterwards:
- The pilot switched into Mission mode again.
- The drone headed for waypoint #6 in MC.
- QGC guided the drone to a selected point then switched into Mission mode.
- The pilot switched into FW in Hold mode.
- The drone reached out of manual comm range and triggered RTL.
- QGC guided the drone to a point near home.
- The drone reached the orbit.
Then the drone had some unexpected and dangerous behaviours.
- The drone kept losing altitude and speed, seemed like stalling.
- QGC reset altitude setpoint, attempting to increase altitude.
- The drone kept losing altitude, then after a serval seconds, almost rolled upside down.
- Quad-chute was triggered.
- The pilot took over and landed.
Mission Plan

Complete Trajectory

QGC Screen Recording with Onboard Computer

Detailed Record
| ID for Reference | Operation / Behaviour | Step of Script Process | Timestamp In Video |
|---|---|---|---|
| 2-1 | The script started | Step 1 | 0:00 |
| 2-2 | The drone takeoff-ed and followed the mission plan | Step 2 | 0:21 |
| 2-3 | When the drone reached waypoint #5, the script successfully sent the signal and the drone switched into Offboard mode | Step 3 | 3:04 |
| 2-4 | The script controlled the drone for 1 second | Step 4 | 3:04 |
| 2-5 | The script sent the signal to switch into Mission mode | Step 5 | 3:05 |
| 2-6 | The drone re-entered Mission mode successfully | 3:05 | |
| 2-7 | The script sent the signal to switch into multi-copter (MC) configuration | Step 6 | 3:06 |
| 2-8 | The drone took ~8 seconds to decrease speed and finished transition into multi-copter configuration | Step 7 | 3:13 |
| 2-9 | The script sent the signal and attempted to switch the drone into fixed-wing (FW) configuration | Step 8 | 3:14 |
| 2-10 | The drone accelerated, almost finished transition | Step 9 | 3:17 |
| 2-11 | Manual controller took control and switched into Stabilised mode, then Position mode | 3:19 | |
| Manual controller switched into Mission mode | 3:23 | ||
| 2-11 | The drone decelerated while approaching waypoint #6 | 3:27 | |
| 2-12 | After reaching waypoint #6, the drone switched into Position mode | 3:43 | |
| 2-13 | QGC controller let the drone re-entered Mission mode and headed for waypoint #7 | 3:52 | |
| 2-14 | QGC controller guided the drone to a selected point on the map, the drone entered Hold mode | 4:28 | |
| 2-15 | Manual controller switched into fixed-wing configuration | 4:45 | |
| 2-16 | The drone accelerated and transitioned successfully into fixed-wing configuration in Position mode | 4:51 | |
| 2-17 | The drone exceeded manual control range and triggered RTL | 4:56 | |
| 2-18 | QGC controller guided the drone to a point closer to takeoff point | 5:10 | |
| 2-19 | The drone switched into Hold mode | 5:10 | |
| 2-20 | After reached the orbit, QGC controller noticed that the drone was losing airspeed and altitude, seems like stalling | 5:31 | |
| 2-21 | QGC controller re-selected altitude setpoint to be higher | 5:44 | |
| 2-22 | The drone failed to re-gain altitude, and after a few seconds, the drone suddenly rolled over | 5:53 | |
| 2-23 | Quad-chute emergency was triggered and the drone switched to multi-copter configuration | 5:54 | |
| 2-24 | Manual controller took control and landed the drone | 6:03 |
Confusion
- [2-20, 2-21, 2-22] Why the drone lost height & speed and rolled almost over?